东京大学研究生院信息理工学系研究科的竹内昌治教授、小田悠加特任助教、清水直人(研究当时为硕士生)等为核心的研究团队发表研究成果称,成功开发出了利用微细藻类中的一种“衣藻”来驱动小型构造物的方法。衣藻的鞭毛在微生物中具有较强的推进力,研究人员设计了一种不会阻碍衣藻鞭毛运动的陷阱结构,并使其可以编入到各种微细结构之中。这种方法有望开发出用作驱动微型机器人,理解微生物运动的工具。相关研究成果于7月8日已发表在国际学术期刊《Small》上。
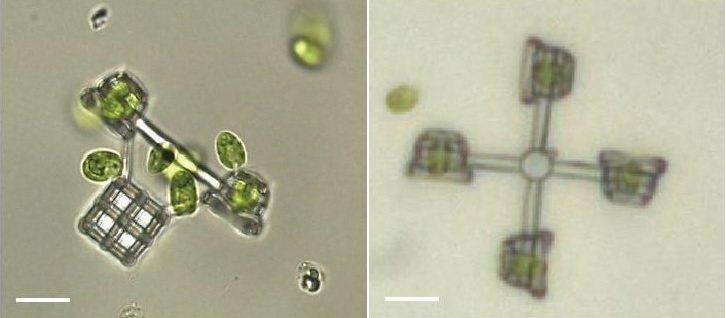
图1 由衣藻驱动的微型机械。由两个朝向同方向的衣藻驱动的结构体(左)和由四个衣藻驱动的旋转结构体(右)。比例尺:10μm(供图:东京大学)
微型机械在环境污染物调查与清理微小环境中的物质等领域具有广阔的应用前景。另一方面,由于体积较小,这种机械无法使用电池或马达驱动,并且物质越小在水中移动时粘性越占主导地位,所以难以实现高效移动。
为了解决这些问题,研究团队对衣藻的推进力的利用进行了研究。
衣藻通过像蛙泳手一样挥动两根鞭毛来游动。研究团队据此设计了一种尽可能不阻碍这种运动“笼状”陷阱结构。当使用超精密三维立体光刻机将这种与衣藻大小相似的结构进行建模时,发现由于陷阱结构存在许多空隙,衣藻的鞭毛能够从中伸出并运动,证实该结构还可以布置成各种形状。
研究人员制作了两种类型的陷阱结构:一种是四个衣藻呈圆形布置的结构,另一种是两个衣藻朝向同方向的结构。
经实验观察到圆形布置的微型机械发生了旋转运动,并维持着稳定姿态。研究还发现,结构体的旋转速度随着衣藻数量的变化而变化。
该技术在水环境的环境监测、利用趋光性的物质运输和动力传输机制等研究领域有着广阔的应用前景。
竹内教授表示:“研究始于清水直人还是硕士生时提出的利用衣藻驱动微型机械的想法。起初该想法被认为难以实现,但清水坚持研究,在大约半年后取得了成功。该成果的成功是在研究了杯子的大小和高度、衣藻的浓度等多种条件后所取得的,并根据成果发表了此次论文。虽然该研究仍处于基础阶段,但我们认为它可以用作一种生物物理学的工具,能用来研究多个衣藻在物理性约束下的运动,或者在不对衣藻进行化学修饰的情况下放大运动并进行分析。未来,我们相信该方法还能够实现更广阔的应用,例如将这样的复杂结构安装在池塘中,通过调节池塘中大量衣藻的运动来获取能量等。”
原文:《科学新闻》
翻译:JST客观日本编辑部
【论文信息】
期刊:Small
论文:Harnessing the Propulsive Force of Microalgae with Microtrap to Drive Micromachines
DOI:10.1002/smll.202402923