东京工科大学工学部的野田龙介讲师等的研究团队发布研究成果称,全球首次明确了蜻蜓快速逃生起飞时的流体力学机制。此番蜻蜓固有的优异机动性飞行机制的阐明有望促进开发新一代扑翼式飞行机器人。相关成果已发表在《Journal of Fluid Mechanics》的线上版。
许多具有飞行能力的昆虫由于振翅运动和体型特点而具备出色的飞行性能,所以作为新型小型飞行机器人的设计参考而备受关注。其中,蜻蜓作为地球上最成功的空中捕食者之一,自古以来就生存于地球并实现了不断进化。与许多昆虫的前翅和后翅成对进行振翅运动相比,蜻蜓的特点是可以独立控制前翅和后翅飞行。
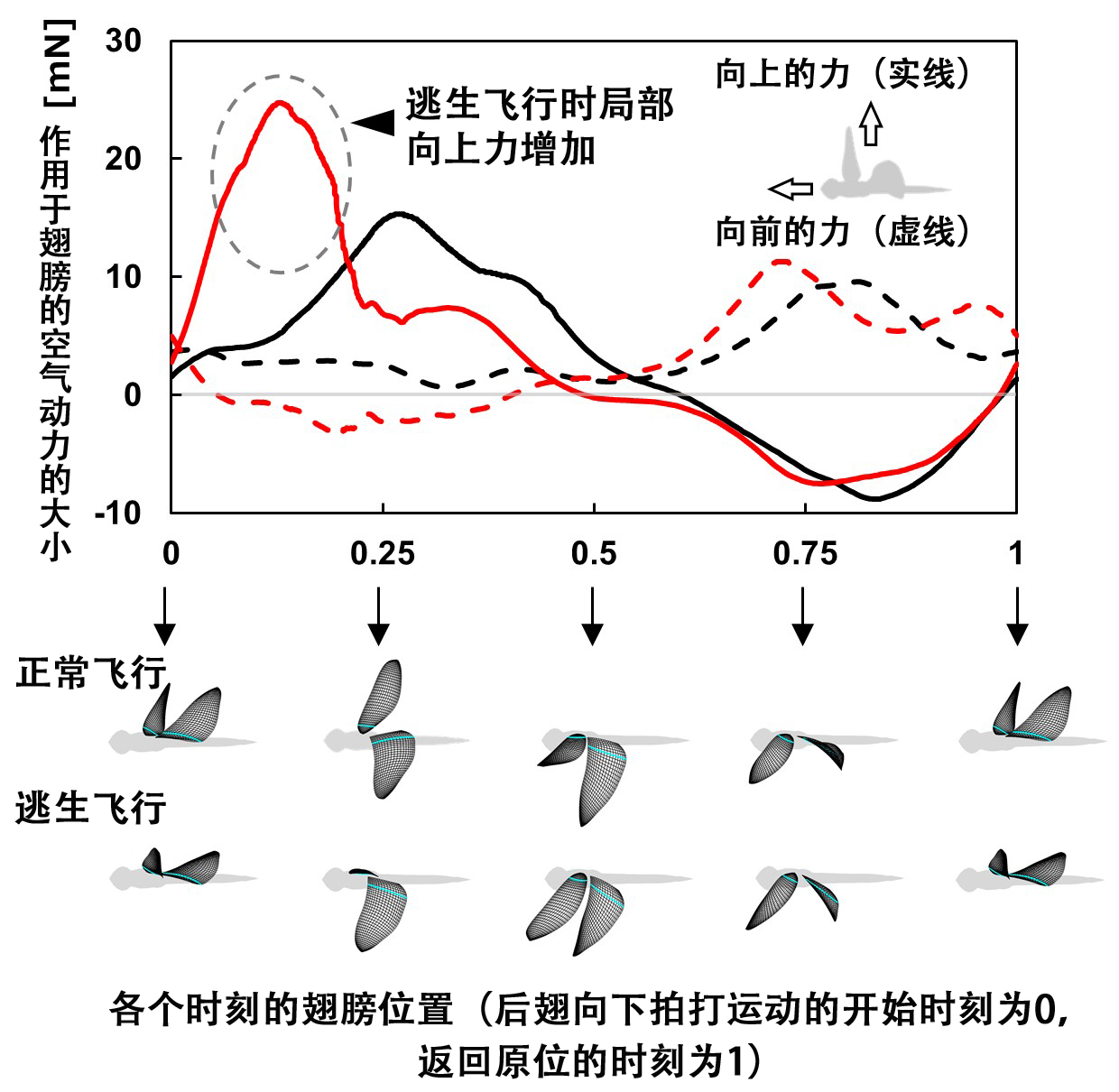
图1 蜻蜓振翅运动时作用于翅膀的空气动力。黑线表示正常飞行,红线表示逃生飞行。逃生飞行时,向上的力会在局部出现大幅增加。(供图:东京工科大学)
研究团队利用蜻蜓正常飞行时的翅膀运动和世界上首次测量到的逃生飞行时翅膀的运动,通过数值模拟了对振翅运动产生的空气动力,并分别进行了验证。
数值模拟的结果在世界上首次明确了蜻蜓逃生飞行时后翅的迎角比正常飞行时更大,以降低飞行效率为代价使局部空气动力增加的机制。
此外,研究团队还揭示了这种空气动力的增加是蜻蜓巧妙地改变了前翅和后翅的振翅时机(相位),利用前翅扇动产生的气流,促进在后翅表面产生稳定的涡流,从而对空气动力的生成做出很大贡献。
这一发现与以往的研究所展示的蜻蜓逃生飞行时前翅和后翅的振翅时机有所不同,揭示了蜻蜓通过新的流体力学机制增加用于逃生时局部空气动力的可能性。
近年来,尽管旋翼式无人机已在货物运输、农药喷洒、基础设施巡检等领域得到广泛的社会实际应用,但仍存在安全性及噪音等问题。模仿自古以来与人类共生的蜻蜓等生物飞行的扑翼式飞行机器人,有望促进上述问题的解决,本次的成果有可能成为其设计指南的重要因素。
原文:《科学新闻》
翻译:JST客观日本编辑部
【论文信息】
杂志:Journal of Fluid Mechanics
论文:The Interplay of Kinematics and Aerodynamics in Multiple Flight Modes of a Dragonfly
DOI:doi.org/10.1017/jfm.2023.471