由东京大学研究生院信息理工学系研究科的竹内昌治教授和任新竹(硕士研究生),以及早稻田大学理工学术院基干理工学部的森本雄矢副教授组成的研究团队发表研究成果称,通过使用人体来源的培养肌肉细胞,开发出了多关节生物混合型机械手。研究团队通过将细长的培养肌肉组织捆绑在一起,实现了高收缩性能,使得具有多关节连杆结构的手指能够完成弯曲的动作。这一成果有望应用于开发无需电源,由佩戴者的意识驱动的义肢,以及药物试验模型。相关研究成果已发表在国际学术期刊《Science Robotics》2月12日刊上。
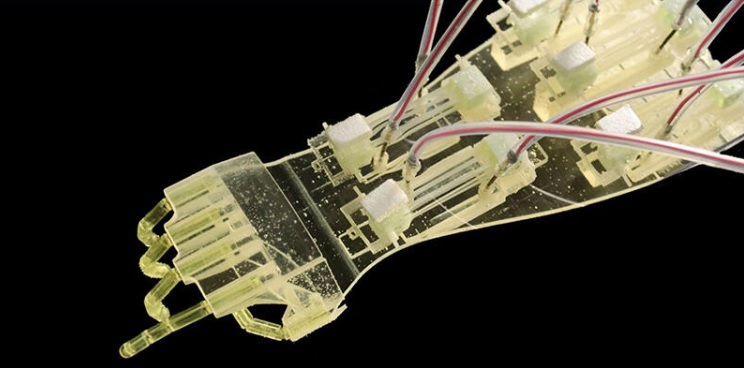
多关节生物混合型机械手(供图:东京大学)
生物混合型机器人是一种将生物组织与人工材料融合的机器人,有望通过利用生物组织,实现既往机械机器人所不具备的柔韧性和自我修复能力等。
此前报告的使用肌肉组织的生物混合型机器人主要以单一关节驱动为主,由于肌肉组织中心部分的细胞会坏死而无法培养较粗的肌肉,因此很难产生强大的力量(收缩力),机器人的尺寸通常只有3厘米左右。要驱动更大的结构,需要具有更高输出和更长收缩距离的肌肉驱动执行器。
为此,研究团队此次设计并开发了“多肌肉组织执行器(MuMuTA:Multiple Muscle Tissue Actuator)”。MuMuTA采用将培养的细长人体肌肉组织捆绑在一起的结构,成功实现了高收缩力和高收缩长的兼顾,达到了约8毫牛的收缩力和约4毫米的收缩长。
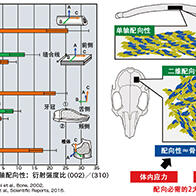
MuMuTA的制作方法是,首先把肌肉组织排列好之后再进行培养,培养成熟之后再将其像竹帘一样卷成卷状(命名为寿司卷工艺)。
对培养的肌肉组织特性进行评测后发现,培养的肌肉组织与生物肌肉的特征相似。通过连续刺激,确认培养肌肉组织出现了与生物肌肉类似的因疲劳导致的收缩力下降,以及通过休息恢复收缩力的现象。此外,通过制作不同宽度的多条肌肉组织并比较它们的收缩能力后发现,较细的肌肉组织收缩效率更高。
接下来,研究团队将制作的MuMuTA与机器人骨架相结合,成功构建了世界最大的18厘米多关节生物混合型机械手。搭载的多关节连杆结构,可将MuMuTA的直线收缩运动通过线驱动结构转换为关节的旋转运动,就如同人类手指的肌腱和肌肉一样。每根手指都内置有一个MuMuTA。
在浸泡在培养液中的状态下,通过施加电场可以分别驱动每根手指,研究团队还成功移动了物体(移液器吸头)。
竹内教授表示:“展望未来,我们希望能够进一步提高输出功率。我们计划提升每条培养肌肉组织的收缩性能,并将它们结合在一起,目标是至少能够拿起苹果大小的物体。虽然目前还处于基础研究阶段,但如何在体外制造出与体内相似的肌肉组织仍是一个挑战。未来的义手和义足可能会与生物体融合,因此这项技术在义肢应用方面备受期待。此外,我们认为它还可以作为医药开发中药物试验的模型。”
原文:《科学新闻》
翻译:JST客观日本编辑部
【论文信息】
期刊:Science Robotics
论文:Biohybrid hand actuated by multiple human muscle tissues
DOI:10.1126/scirobotics.adr5512