美国Alphabet旗下的英国Google DeepMind以及企业家埃隆·马斯克领导的美国特斯拉正致力于开发类人机器人。其中的关键是生成式AI(人工智能)。AI的出现加速了超越特定作业的机器人的开发。本报就研究前景采访了专门研究机器学习和机器人工学的早稻田大学尾形哲也教授。

早稻田大学尾形哲也教授:1993年毕业于早稻田大学理工学部。2005年担任京都大学研究生院信息学研究科副教授,2012年起担任早稻田大学理工学术院教授。2020年起担任早稻田大学新一代机器人研究机构AI机器人研究所所长。
——您如何看待生成式AI和机器人研究的现状。
“随着大规模语言模型(LLM)的出现,机器人几乎可以完成所有能用语言指示的工作。也可以自动编写程序。但是,机器人无法完成像系鞋带、做炒蛋等不能仅靠文字就能简单说明的工作。”
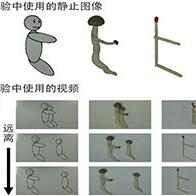
“我们需要的是通过身体运动获得的经验数据。以使用(机器人的)身体的作业数据为基础进行学习很重要。因为折纸和烹饪不能简单地解释,所以机器人也不知道该怎么操作。我们已经进入了一个试图揭开无法直接用物理方程式解开其现象的阶段。”
——如何收集这些身体数据并让机器人学习呢?
“这是一个重点。现在是让机器人通过反复折叠洗好的衣物等特定的作业来学习。事实上,我们希望有一种方法可以整合这些经验数据,让机器人更容易掌握。但目前还没有通用可行的方法。”
“人类是处理未知任务能力异常强的生物。例如,打开一扇门有许多不同的方法,但如果你知道几种开门的模式,你就可以猜到并打开它。这对机器人来说很难。随着越来越多的对看似普通的任务的研究出现,我们可能会逐渐看到AI无法学习的局限性。”
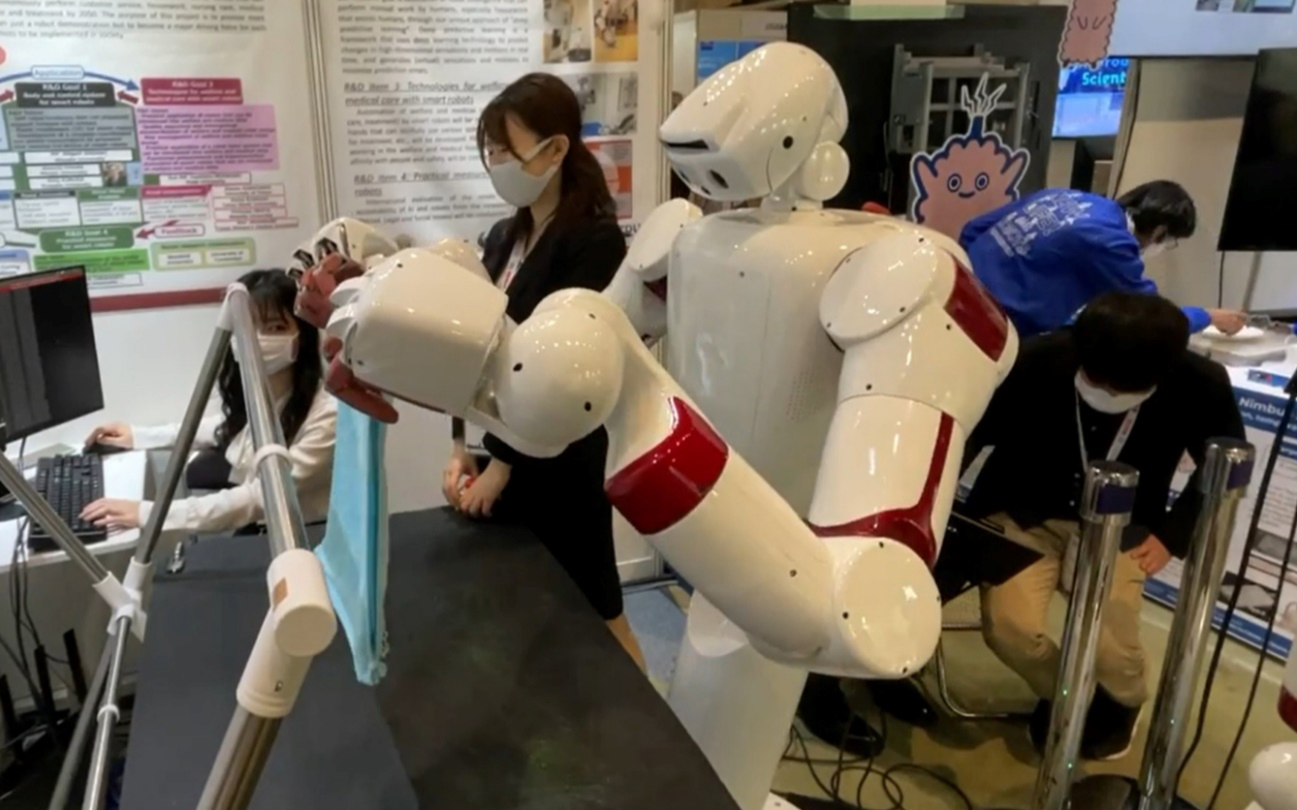
早稻田大学展示的机器人挂毛巾作业演示(2022年)
——机器人学习的关键点是什么?
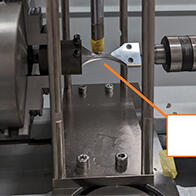
“是触觉。大多数人认为可以通过图像模型或LLM来进行控制,但是在人类实际操作时更多的是依靠手的触觉。即使是拉开或关闭拉链,当意识到卡住时人类也能判断应该向哪个方向施力。如果收集触觉信息并让AI学习,现有的机器人的表现也有可能超出预期。在企业界,特斯拉正在采取这样的方法。”
“关键词是‘共同进化’。我们以往的工作是为工业用机器人开发人工智能,但现在恰恰相反。如果可以用AI来控制机器人,那么就要为它添加机器人功能。增加图像和触觉,使其成为多模态机器人。这样一来,又要求AI必须是多模态化的。这样反过来又可以提高机器人的功能,例如增加手指和手臂的数量等。”
日文:前田悠太、《日经产业新闻》、2024/3/25
中文:JST客观日本编辑部