上接:用智能机器人连接AI与社会,陪伴人类并提供家务、医疗和养老援助(上)
发展“深度预测学习”
最大限度减少与现实的误差
菅野先生等为建立协助家务的机器人的智能化,开发了“深度预测学习”。传统的机器学习利用大量数据构建最佳预测模型,使机器人能够执行各种任务。然而,在现实中,机器人经常会遇到一些意想不到的情况,很难构建一个能够应对所有状况的预测模型。“另一方面,深度预测学习会根据视觉和触觉信息进行预测,为最大限度减少与现实的误差做出下一个动作的指示。如此一来,机器人便可以灵活应对任务内容和周围环境的变化”,菅野先生说明道。

图4 与人类共存型干式机器人“Dry-AIREC”
为进行学习和获取人类技能而开发的“Dry-AIREC”干式机器人是向东京机器人公司(Tokyo Robotics,东京都文京区)定制的。各关节均内置高分辨率扭矩传感器,表面采用接近人体皮肤的凝胶材料制成(左)。机器人的动作柔和,人在外部动作也能够完美跟随,是世界上最高水平的人类共存型干式机器人(右)。
目前,基于项目开发的人类共存型干式机器人“Dry-AIREC”,研究人员正在致力于实现协助人类的手工作业,特别是家务的机器人智能化(图4)。通过协调机械手的双臂,已经实现了晾晒和折叠衣物等家务任务(图5)。然而,要区分丝绸和羊毛等触感不同的衣物还十分困难。此外,仅家务活动中就存在大量困难的课题,如掌握使用多种食材的烹饪技能、垃圾处理和擦拭地板等需要适应环境的清洁方法,要实现无所不能的机器人绝非易事。
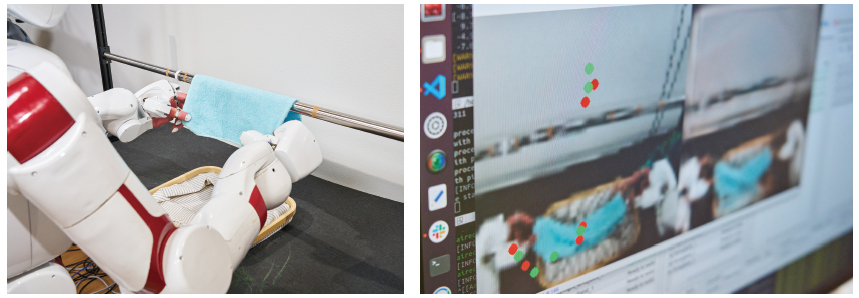
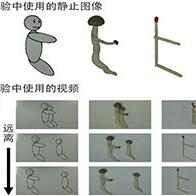
图5 “Dry-AIREC”学习洗涤辅助动作
研究团队与德国慕尼黑工业大学合作,使用了深度预测学习和注意机构的双臂,协调进行了衣物晾晒实验。结果表明,可以识别以不同晾晒方式和位置的衣物,并执行机器臂的弯曲和伸直、抓取和提起衣物等动作。
在医疗和护理领域使用智能机器人协助人执行任务时,为绝对避免对人造成伤害,必须确保安全、柔和地工作。因此,目前研究团队正在开发可以在人的旁边提供帮助的“生物混合型机器人皮肤”,以及能够进行触诊和简单处理等医疗检查专用的机械手。除了上述技术之外,为构建可以执行对人进行物理性身体接触任务的机器人系统,还在推进各种动作实验(图6)。
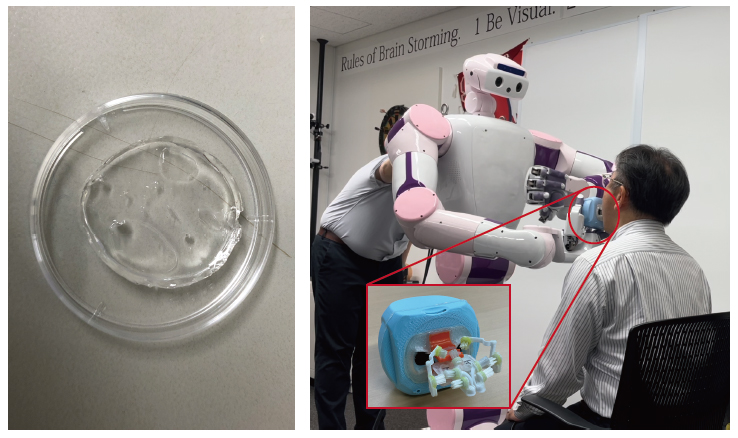
图6 在人身边提供帮助的机器人手部皮肤的开发
为了实现可以替代人手的机器人手部皮肤,以在医疗、护理现场的实际使用为目标,具有弹性、粘合力、高伸展性和自我修复性的凝胶材料(左)、预想用于口腔护理场景并展开实际操作的测试(右)等相关实证实验正在推进之中。
“身体智能的实现”是重要课题
软件和硬件的整合至关重要
除上述项目外,登月型研发事业在AI、中间件和硬件领域也开展了多个研发项目。菅野先生指出,为了实现理想的智能机器人,还有许多课题需要解决。这是因为,与其他领域的研究不同,机器人不会因为一次创新就飞跃式地进入下一个阶段。
菅野先生表示,“身体智能的实现”是关键课题之一。身体智能是指无意识地利用自身身体特征进行动作的能力,例如骑自行车等,其一直被认为是传统AI难以应对的目标。“我认为AI必须从软件转变为‘软件+硬件’。为了实现AI的创新并获得新技能,硬件也必须不断发展”。此外,要实现智能机器人,仅仅开发新技术是不够的,还必须进行“整合”,即将其优化组合。
“即使通过整合形成了组合,随后又会出现下一个课题,为改进这一课题再进行下一次整合。智能机器人的开发就是这一过程的不断重复”。在菅野先生的强烈意志下,不仅是参与该项目的研究人员,同时也汇集了许多学生。在逐一解决阻碍前进步伐的课题的同时,研究团队正在稳步地为智能机器人的社会实际应用开辟道路。(全文完)(TEXT:佐宗秀海、PHOTO:伊藤彰浩)
原文:JSTnews 2024年3月号
翻译:JST客观日本编辑部