像蜈蚣一样多腿移动的“多足机器人”具有出色的耐故障性和防跌倒性能,有望在行星探索和灾害救援等人类难以进入的场所发挥作用。然而,控制与环境进行复杂交互作用的腿部较为困难,尤其是在行走时,需要多腿接触地面抵抗重力来支撑体重,要做出急转弯等敏捷运动更是困难的事情。
通常情况下,虽然在机器人控制上应排除不稳定性,但实际生物在进行运动控制时往往在积极利用不稳定性。大阪大学研究生院基础工学研究科的青井伸也教授的研究团队认为,可以将多足机器人的不稳定性快速转移成其他运动的驱动力。
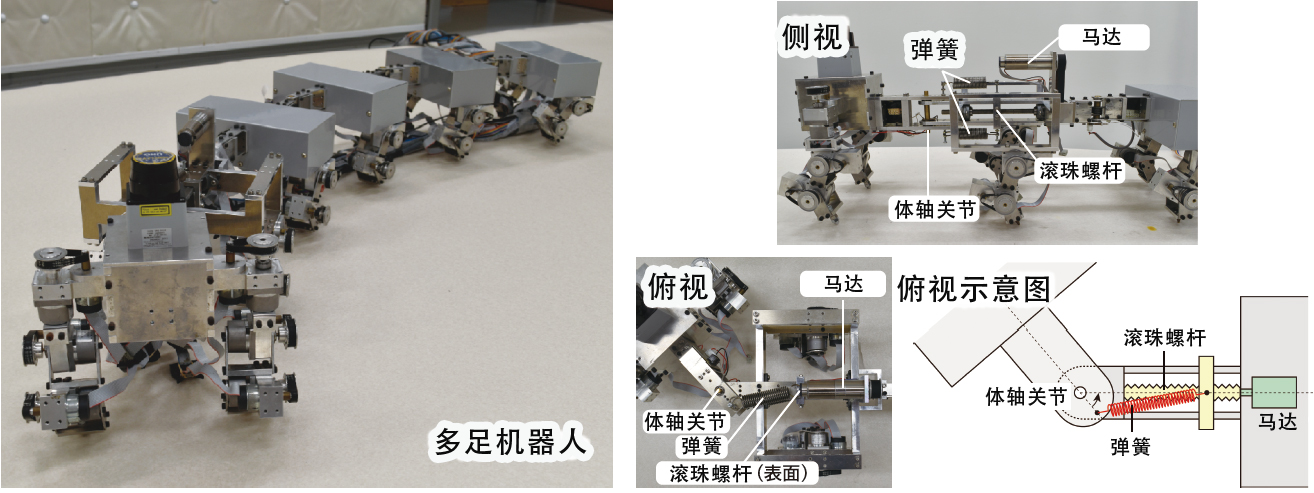
研究团队此前已经证明,通过对装有旋转弹簧、拥有柔性轴的多足机器人,利用以弹簧刚性为参数的“叉型分岔”使直线行走变得不稳定,转变为半径依赖弹簧刚性的圆弧路径行走方式。把这种不稳定性作为驱动力,通过改变体轴的旋转弹簧的刚性,开发出了能够自如引发直线行走不稳定性的新机构。并且通过进一步控制转变而来的曲线行走半径使机器人到达目的地,成功实现了灵活且高效的多足机器人行走。
本次研究成果利用力学特性实现了简单的控制,有望让机器人代替人类在多种场所和场景中发挥作用。此外,该成果还有助于理解生物的运动机制,有望用于人工物体的开发等领域。
TEXT:横井Manami
原文:JSTnews 2023年8月号
翻译:JST客观日本编辑部