近日,日本藤田医科大学进行了一项远程操作手术辅助机器人的实验。在东京都港区和相距约300公里外的爱知县丰明市之间,由东京的经验丰富的医生一边指导爱知的年轻医生一边进行操作。实验使用网络专线,减少了视频共享的延迟,确认实际应用也无问题。藤田医科大学还公开了最早在2024年构建连接日本和海外的通信网络,以进行远程手术的计划。
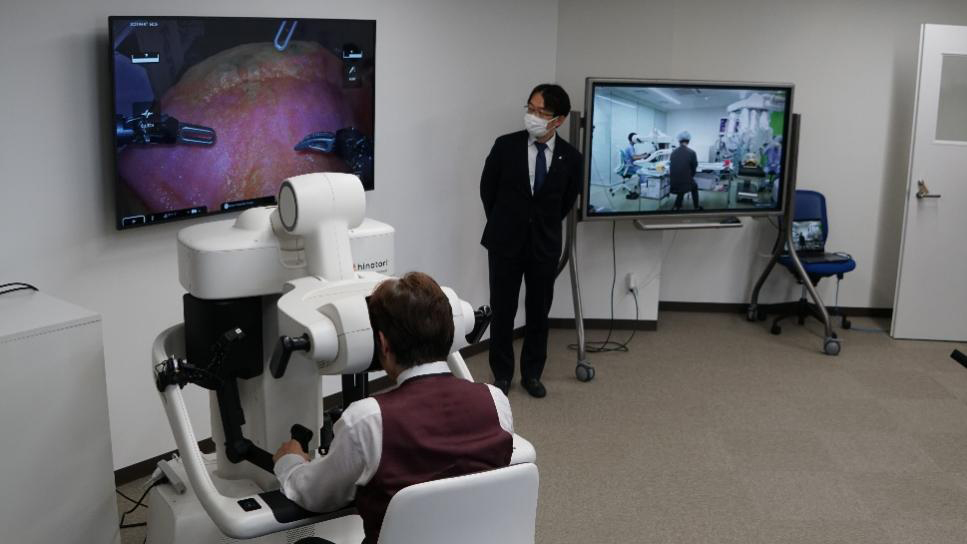
东京经验丰富的医生(左前)指导位于爱知的年轻医生(右方屏幕中)进行机器人手术
该试验在4月7号由与藤田医科大学合作开发手术辅助机器人的希森美康(SYSMEX)株式会社、川崎重工业株式会社、以及希森美康出资的企业Medicaroid株式会社联合实施。
实验中,将位于东京都港区的希森美康和位于爱知县丰明市的藤田医科大学通过专线相连,爱知县的年轻医生在东京经验丰富的医生的指导下,使用手术专用的模拟脏器进行了机器人手术。
手术辅助机器人的机器手臂代替医生的手臂进行手术,由医生通过双手和双脚操作位于他处的、名为外科医生操作舱(surgeon cockpit)的装置。
外科医生操作舱通常被放置在机械臂及患者所在的同一手术室内,但如果相隔较远,也可用于远程手术。在远程指导实验中,东京和爱知的医生坐在各自房间的操作舱内。两名医生通过共享从安装在位于爱知的机器手臂前端的摄像机拍摄的模拟脏器视频,交替进行操作。
本次实验,确认了不存在向远距离外的医生传送手术现场视频出现延迟以及通信速度波动等问题。通常手术允许的延迟为100毫秒以内,此次仅延迟了37毫秒。
藤田医科大学教授宇山一朗表示,“我没有感觉到任何延迟,甚至分不出是在(机器手臂)旁边操作还是远程操作。”
日文:茂野新太、《日经产业新闻》、2023/4/19
中文:JST客观日本编辑部