尽管机器人的进步十分显著,但依然有很多事情对于人类来说很简单,但对机器人来说却还困难重重。比如一边感知所抓东西的触感,一边调整抓力大小就是其中之一。让机器人实现这一功能的是“力触觉(real haptics,真实触觉)”技术,由庆应义塾大学初创企业Motion Lib(川崎市)开发。对此,我们采访了该公司CEO(首席执行官)沟口贵弘先生,了解了技术详情及用途。

Motion Lib CEO沟口贵弘。实现真实触觉的半导体也由该公司自行研发。
——真实触觉是一项什么技术?
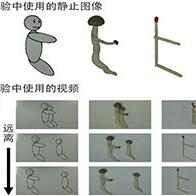
“这是一种可以将人类的触觉和抓力的大小数字化并再现的技术。可提取出手触摸东西时的触感和施加力量的动作等数据,并利用机器人等再现或远程传递。例如,它可以再现工匠手指的精细动作,是人与机器人协同工作时有用的技术”。
“如果说机器学习相当于人类做判断的‘大脑’,那么真实触觉就相当于(掌管知觉和运动的)小脑和神经。就像小脑和神经可以调节身体的动作和释放力量的大小那样,真实触觉通过对力量和位置的综合控制来再现人的轻柔动作”。
——用机器人来处理触觉和力量的优点是什么?
“目前的机器人接触物品时不基于触觉,也就无法根据触觉控制力量。由于之前的机器人主要是在工厂内完成规定的工作,所以没这个功能也够用。但是今后机器人要走出工厂,走进各类人手不足的行业,应用场景更加广泛”。
“护理用机器人就是其中一个例子。它需要像人类的手一样,灵活而温柔。在此类用途中,能够识别触觉和力量大小,会让人更有安全感更让人安心”。
——也就是说,赋予了机器人之前没有的功能。
“我认为这一功能的价值不在于它实现了物联网(IoT),而在于更进一步的行动互联网(Internet of Actions,IoA),也就是说实现了动作的互联网化。如果动作数据都能共享(像软件一样),那么该功能就不局限于某个行业,可以应用到多种场合”。
“例如,让农民使用支持IoA的机器人,搜索‘插秧’或‘割稻’,下载软件后就可以在这些工作中使用机器人。或许某一天,可以在家中使用已掌握了寿司匠人手艺的机器人做寿司”。
——目前还存在哪些技术课题?
“需要让机器人加深对人类动作本身的理解,以及能够忠实地再现从人体提取出来的动作的硬件。目前的机器人并不是以再现人类动作为前提设计的,关节的数量等也与人体不同,但人类有多少关节就给机器人装多少关节也是不现实的。重要的是找到与人类协作时的平衡点”。
关键是与人协调动作和确保安全
在制造领域,虽然IT(信息技术)及机器人技术使得自动化程度越来越高,但在护理及医疗、农业等依靠人手的行业中,人材不足的情况依然严峻。今后,机器人的用途也将扩大到这些领域。
在工厂使用的产业机器人只需要不断重复已经决定好的动作,而机器人进入到护理等行业后,机器人需要象人一样拥有灵活柔顺的动作。因此,需要收集庞大的人关于感觉和动作的庞大数据,并根据需要应用人工智能(AI)让机器人再现动作。
面对即将到来的人类身边有机器人,机器人与人协同工作的时代,制定确保安全的规则和制度是必不可少的。为了尽可能减少机器人动作发生异常,除了要制定安全标准,还要考虑一旦发生事故时如何界定负责方,这些都亟待产官学联合深入探讨。
日文:高崎文、《日经产业新闻》、2022/9/26
中文:JST客观日本编辑部