据说四足动物的共同祖先走路时躯干都像蜥蜴一样弯曲(蜥蜴式步态)。日本东北大学电气通信研究所的石黑章夫教授、加纳刚史副教授和铃木朱罗(参加研究时正在读博士),与瑞士洛桑联邦理工学院的Auke Jan Ijspeert教授组成的研究团队,查明了蜥蜴式步态能够产生全身运动控制机制的原理,明确了“四肢与躯干移动时相互辅助彼此的动作”这个非常简单的控制规则,同时还全球首次成功再现了蜥蜴式步态的模式随着移动速度发生的变化。该成果有助于明确四足动物巧妙地操控全身运动的机制以及开发新的机器人。相关成果已在线发布于Frontiers in Neurorobotics上。

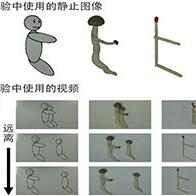
蜥蜴等弯曲躯干行走的样子。通过合理组合四肢与躯干的运动可以大步行走(图片由东北大学电气通信研究所提供)
地球上有各种各样的四足动物,它们的共同点是,不仅利用四条腿,还利用包括头部、尾部和躯干部等在内的全身协调运动来移动。如果能明确这些四足动物共同存在的全身运动的生成机制,不仅能加深对动物出色的运动能力的生物学认识,还有望应用于工学领域,作为在自然环境中自由行动的活跃机器人的控制策略。
在蜥蜴式步态中,四肢和躯干的运动会随着移动速度等条件而变化,因此认为这种现象的背后存在存在一种机制,可以根据情况灵活改变生成的全身运动。此外,呈现蜥蜴式步态的生物的神经回路与狗和猫等哺乳类动物的神经回路相比结构更简单,因此蜥蜴式步态与其他四足动物的动作相比可能是通过更简单的运动控制机制实现的。此外,足迹化石等表明,现有四足动物的共同祖先——原始四足动物也使用蜥蜴式步态,这种步态中可能包含着四足动物共同的运动控制的本质。
虽然蜥蜴式步态对明确全身运动控制方面的重要性已被提出,但此前一直不清楚蜥蜴式步态是通过何种控制机制实现的。
研究团队采用了通过模拟再现动物的运动来调查其机制的方法。因为关于神经功能和身体运动的信息很容易测量,可以在各种实验条件下获得具有再现性的结果。
在实际的研究中,研究团队为机器人安装控制律,确认了其行为。该机器人在有10个关节的躯干部连接了有2个关节的腿部。控制律大致分为3种控制机制,分别负责“四肢的协调”、“躯干的协调”和“四肢与躯干的协调”。各个机制的功能如下:在腿部受力期间,确保腿部直接持续支撑身体的“四肢协调控制”;确保各个关节的角度追随前方关节角度的“躯干协调控制”;根据彼此的动作进一步增加步幅的“四肢与躯干的协调控制”。
模拟实验证实了可以呈现稳定的蜥蜴式步态。另外还发现,四肢和躯干的运动会随着移动速度和身体结构等参数而变化。研究确认,这些步态模式的变化与真实动物的行为基本一致,证明了所提出的控制律的合理性。
原文:《科学新闻》
翻译编辑:JST客观日本编辑部