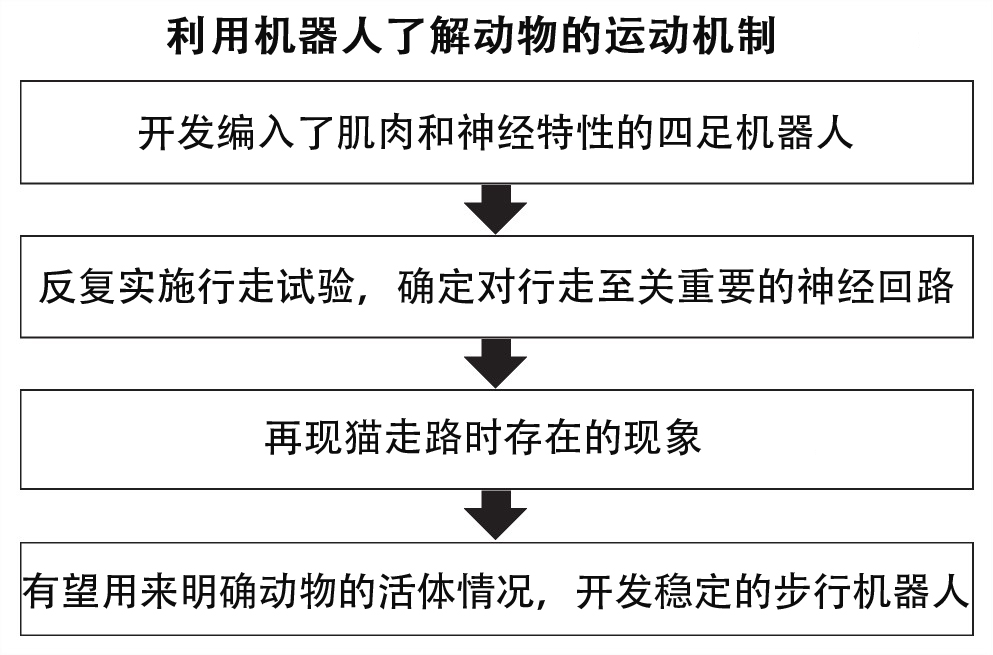
日本大阪大学的增田容一助教等人组成的研究团队开发出了可以编入动物的神经和肌肉特性从而移动行走的机器人。研究团队发现了控制猫行走的重要神经回路,再现了猫的稳定行走。通过用机器人再现运动,有助于查清动物活体的情况,还有助于结合动物的身体机制,开发灵活、稳定的步行机器人等。
研究团队为调查动物的行走情况,开发了模拟动物的四足机器人。机器人利用马达和电路在每条腿上分别再现了控制腰部和膝盖移动的4块肌肉。通过用计算机设置每块肌肉和每条神经的动作及连接等,使机器人移动。
为了利用新开发的机器人发现实现稳定步态的神经回路,研究团队反复试验,不断改变肌肉与神经的连接,让机器人行走。
结果发现,只需在每条腿上再现简单的神经回路(使腰部及膝盖伸展和收缩的肌肉联动的神经回路),就可以稳定行走。当机器人在没有此次发现的神经回路的状态下行走时,其行走节奏就会变得不规则。
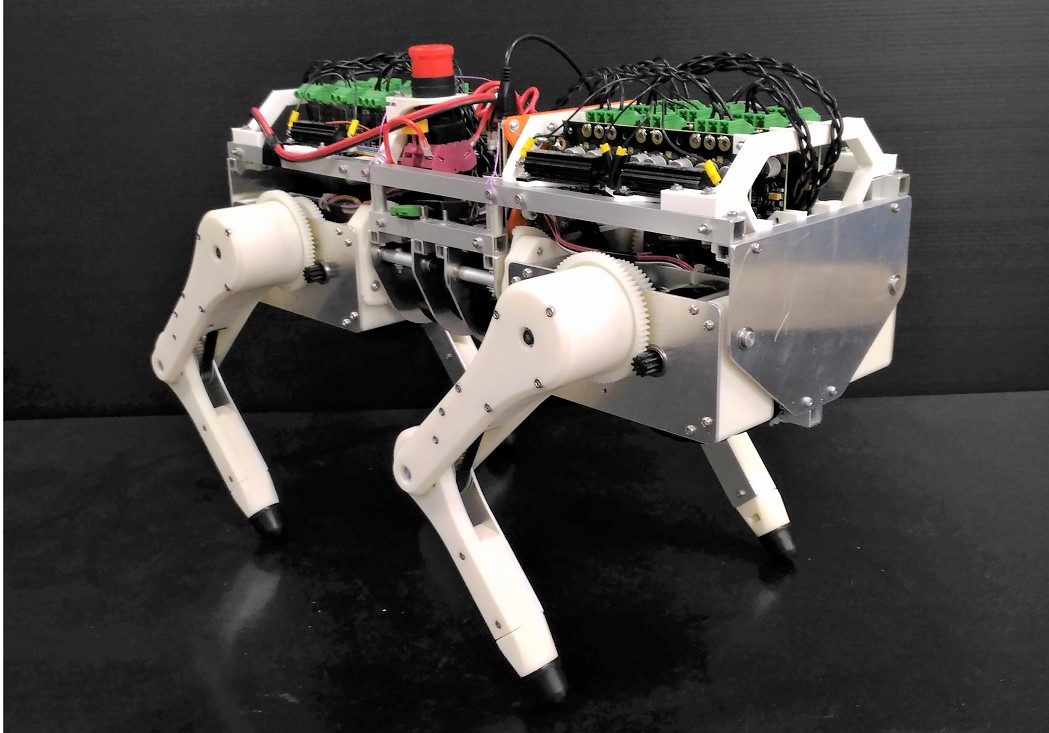
新开发的四足机器人可以编入动物的神经和肌肉特性(图片由大阪大学增田助教提供)
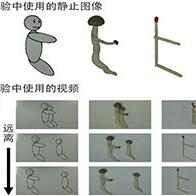
众所周知,向正在行走的猫的腿部施加电刺激,猫会站在地上无法迈出下一步。对于嵌入了研究团队发现的神经回路的机器人,在相同的条件给予刺激,也出现了同样的现象。
近年来,研究人员逐渐发现,动物的行走运动不是由大脑和脊髓中复杂的神经回路产生的,而只是由简单的反射性神经回路产生。关于猫行走的研究在20世纪后半期取得了进展,但现在因爱护动物等原因,动物实验受到了严格的管理和限制,利用动物活体调查行走机制变得困难。
为此,用机器人取代实验动物来了解动物的方法受到了关注。增田助教介绍说:“原因在于机器人的性能得到提高,可以再现生物体的动作,而且机器人的成本降低,更容易在实验中使用。”
目前普通的四足机器人大多是在掌握自己的身体和周围情况的同时,快速计算下一步的行动来实现移动的。通过获取动物的运动机制,可以实现高效和灵活移动的机器人。
增田助教表示:“通过了解动物的动作,将来机器人可以获得符合自然和物理规律的运动能力。”
日文:张耀宇、日经产业新闻,2021/05/17
中文:JST客观日本编辑部