1. 日本在足式机器人领域的发展和成就
人形机器人是机器人学的终极目标,不仅因为大家期望其形态可以近似于人类的情结所致,更是由于人形机器人可以与人类日常生活得环境以及基础设施构造完美衔接。自1970年世界第一台双足步行机器人由早稻田大学研制成功以来,日本在人形机器人的机械结构与运动控制方面的研究一直引领全球。近20年来,日本相继推出了ASIMO,HRP, T-HR3等多款受世人瞩目的人形机器人。

由日本产总研(AIST)联合川田工业共同开发的HRP人形机器人系列
此外,日本在四足机器人的研发同样发展迅速。以广濑茂男教授为代表的仿生机器人专家在四足机器人的机械设计与运动控制方面取得了多项先驱性的研究进展。自上世纪90年代末开始,日本的科技企业也开始在四足机器人商业化方面进行探索。例如,索尼公司面向家庭消费市场推出的四足机器人Aibo至今仍不断地进行产品的迭代改良。

广濑茂男教授制作的四足机器人(左)与索尼研发的Aibo机器狗(右)
2.液压驱动使得足式机器人运动性能实现突出
虽然日本各大企业及学术机构在足式机器人的研发上一直投入巨大,但足式机器人受电机驱动的性能制约也导致日本企业近年在足式机器人的突破进展有所减少。以多达24个以上的自由度的足式机器人为例,分布于其下肢各个关节处庞大的电机驱动器不但很难提供特定任务下所需的瞬时输出,反而在重量方面增加了不少负担。因此,再先进的算法也需要强大的驱动机构作为动力支撑。驱动机构的性能很大程度上决定了机器人运动性能的高低,这种差异在足式机器人上体现的格外明显。

在MIT时期的波士顿动力创始人Marc Raibert
由MIT等世界顶级足式机器人教授创立于1992年的波士顿动力公司,早早便开始探索如何在足式机器人的运动性能方面突破瓶颈,并很快以液压驱动作为切入点,专注于液压驱动的足式机器人方面的研发。在同等情况下用液压驱动可以提供更加强大的输出功率。例如,波士顿动力公司研发的液压人形机器人Atlas可以实现空翻等高难度动作的背后,正是因为有强大的液压动力作为支撑。波士顿动力公司很快便将液压驱动的方案与控制稳定性更高的四足机器人大狗相结合。并在2010年至2013年这8年间,为美国军方推出了液压四足机器人BigDog。
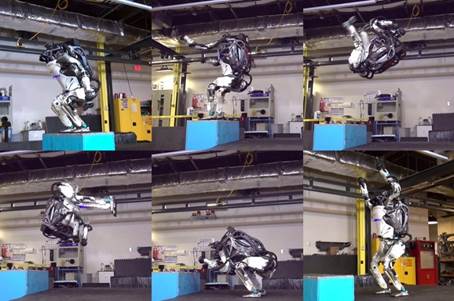
波士顿动力研发的双足液压机器人Atlas实现后空翻动作
3.无刷电机加速四足机器人产品化进程
然而液压驱动的四足机器人需要装载体积很大的液压缸才能支持运行,并且液压驱动器的高额成本以及液压的引擎的高噪声都阻碍着液压驱动四足机器人的商业化进展。因此,四足机器人的专家教授们再次将目光回归到电机驱动方向上,世界上一流的足式机器人实验室开始尝试自主研发机器人电机与驱动机构。
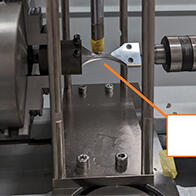
终于在2012年,美国MIT的Sangbae Kim教授的研究团队率先实现了内转子无刷电机,随后又推出了基于该电机的四足机器人Cheetah2,并实现了最快秒速6.4m的奔跑速度。
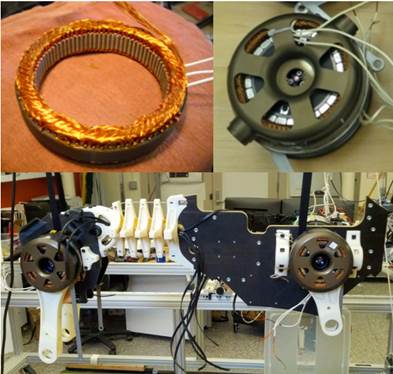
MIT Cheetah所采用的内转子无刷电机与驱动关节
波士顿动力公司也紧随其后在2016年发布了基于无刷电机驱动的Spot Mini,并且快速实现量产。同时,波士顿动力公司最后一次官方发布液压驱动的Atlas视频是2018年。再之后其官方发布的所有新闻及视频都是围绕电机驱动的Spot mini这款产品而开展的。这些现象足以说明,无刷电机驱动已经是各大四足机器人厂家在产品商业化过程中的共识。
4.四足机器人在日本探索行业应用的挑战
2017年7月,日本软银集团从谷歌公司手上成功收购波士顿动力的新闻,引发了机器人界的广泛关注。自从被软银集团收购以来,波士顿动力公司一改过去专注于做前沿研究的风格,快速向产品商业化落地方向转型。而日本成为了波士顿动力四足机器人探索商业化的主要”试验田”。
例如,日本软银在收购了波士顿动力公司以后,在日本鹿岛建设与竹中工务店等数家建筑场景中导入Spot mini进行了2年左右的现场巡检相关的作业。近年,日本的建筑业是受劳动力短缺影响最为严重的行业之一,并且即将出台的建筑行业劳动法案对工作时长进行了严格的限制,都将”倒逼”企业导入机器人。

Spot mini机器人在日本建筑现场进行巡检
同时,四足机器人相比轮式机器人及无人机最大的优势在于应对复杂地面的运动性能。尤其是日本多山多隧道的地理特点,使得足式机器人应对不平整地形的优势会大为凸显出来。在地面环境侦察等应用方面,相比于传统的检测无人机,足式机器人拥有续航能力更强,及更易收集地面环境信息等明显优点。
然而,目前多数足式机器人已经实际落地的情况还无法实现自动化。尤其是在爬楼梯,跨越障碍物等对感知精度与运动规划实时性要求很高的场景还需要人工远程操作的辅助。并且,不少日本劳动力短缺”重灾区”的企业对四足机器人这一全新的机器人平台持观望态度。企业方面对于如何利用四足机器人解决企业当前的劳动力短缺的问题,存在不知如何开展研发工作的顾虑。因此,四足机器人距离真实的商业化落地还面临诸多课题与挑战。
5.未来1-2年四足机器人将进入快速发展期
从2019-2020年四足机器人的行业发展我们不难预见未来1-2年将可能是足式机器人商业化落地将进入快速发展期,并很有可能出现从量变到质变的产品。同时,市场与消费者定位将会逐渐细分化。

波士顿动力Spot Mini在东京羽田空港进行测试
以波士顿动力,Anyrobotics为代表的欧美顶级四足机器人厂家将更加注重于推出针对建筑行业,危险环境作业等特定场景的高端解决方案。
于此同时,中国新兴的四足机器人企业将更加专注于打造更具性价比的消费级四足机器人,加速四足机器人产品的普及化。

逐渐开源化的四足机器人
以斯坦福大学,纽约大学为代表的研究机构也相继推出等开源四足机器人平台pupper,solo等。同时四足机器人相关的核心零件如电机,激光雷达,单片机电脑等也相继低价化。
并且日本当前劳动力短缺的社会问题为四足机器人行业应用的探索提供了有利的条件,期待四足机器人可以得到快速的发展。
文:王宇清,余锦泽
编辑修改:JST客观日本编辑部