日本国立研究开发法人新能源产业技术综合开发机构(NEDO)与中央大学理工学部中村研究室合作,利用轴向纤维强化型人工肌肉用橡胶的拉伸结晶特性防止了裂纹的扩大,成功将人工肌肉的寿命最大延长100倍。今后计划将该成果应用于可变粘弹性下肢辅助装置等。
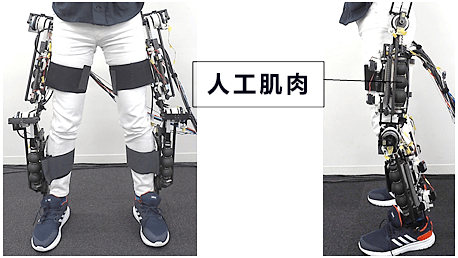
图1:采用此次开发的长寿命型轴向纤维强化型人工肌肉的可变粘弹性下肢辅助装置Airsist
在老龄化社会,劳动力短缺已成为严重问题,目前正积极通过业务自动化和机械化来提高效率,但在农业、制造业和护理等领域,因作业效率问题和空间不足等原因,有些工作难以实现自动化和机械化。因此,身体佩戴式辅助装置等以减轻作业负担为目的的产品的实用化备受期待。
身体佩戴式辅助装置使用的驱动装置(致动器)之一是轴向纤维强化型人工肌肉,是气动橡胶人工肌肉的一种。这种人工肌肉采用在橡胶管中插入轴向对齐的增强纤维的结构。向其施加气压后会在半径方向膨胀,在轴方向收缩,可作为致动器使用(图2)。另外,这种人工肌肉轻而柔软,在低压驱动下最大能收缩38%以上等,与普通的McKibben型人工肌肉相比具有优异的收缩特性。但缺点是由于橡胶会严重变形,容易因为橡胶劣化而出现裂纹,寿命比较短,成为实用化的课题。
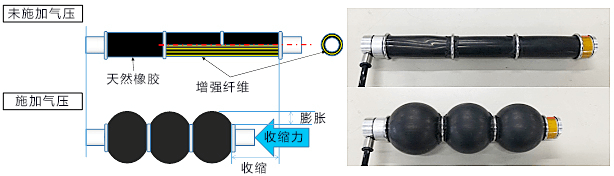
图2:轴向纤维强化型人工肌肉
此次的成果
图3是通过橡胶的拉伸结晶特性延长使用寿命的模型。橡胶受到外部应力的作用变形时,当应力达到一定程度,橡胶分子链结合最弱的部分就会被切断。断裂后,负荷会转移到相邻的分子链上,导致这条分子链也被切断。这个过程一直重复的话,裂纹会不断扩大,并最终断裂。但通过利用橡胶的拉伸结晶特性,随着拉伸形成的晶体层会防止裂纹扩大,可以延长橡胶材料的使用寿命。
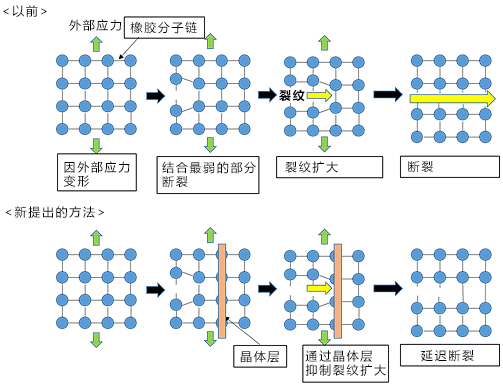
图3:通过晶体层抑制裂纹扩大的模型示意图
图4是通过广角X射线衍射实施的晶体层测量结果(上)和天然橡胶的应力应变曲线(下)。应力应变曲线的横轴为应变,纵轴为应力。测量时将长度拉伸至原来的7倍后再使其收缩恢复原状(蓝色三角形表示拉伸和收缩的方向)。在广角X射线衍射测量中,拉伸时在长度达到原来的4倍时开始观察到表示形成了晶体层的亮点,收缩时在长度恢复到原来的3倍之前均能观察到亮点。以上结果表明,拉伸结晶特性是可逆反应,要想维持晶体层,需要在红线范围内使用。
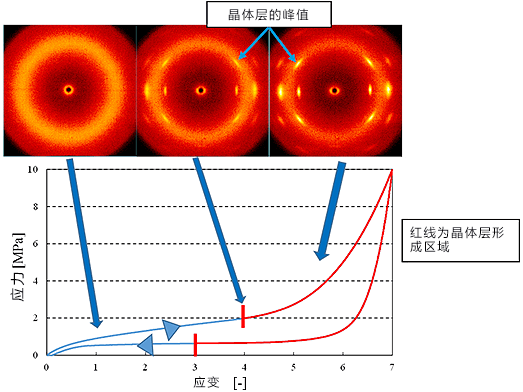
图4:利用广角X射线测量晶体层
研究团队根据这个结果控制了人工肌肉,使橡胶始终保持一定程度以上的拉伸状态,从而维持橡胶的晶体层。以前在伸缩次数达到几百至几千次后就会断裂,而利用此次开发的人工肌肉控制方法,可以伸缩80万次以上,达成了本次研究主题的目标值——20万次(假设一分钟约辅助2次佩戴者,1天使用5小时可使用1年左右,图5)。
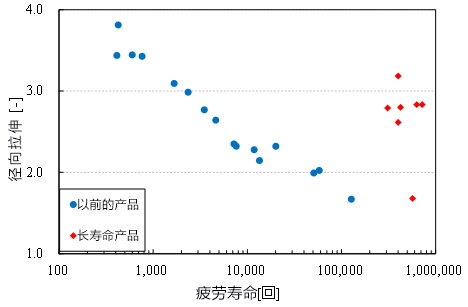
图5:轴向纤维强化型人工肌肉的疲劳寿命
通过将此次开发的人工肌肉应用于身体佩戴式辅助设备,可获得以下4个优点。
(1)由于重量轻,输出功率高,驱动部的移动性较高,可实现小型化。另外,与McKibben型人工肌肉相比,可在低压下获得相同水平的输出,压缩机等气动源可实现小型化。
(2)结构灵活,刚性控制可实现开环控制(无传感器反馈的控制,特点是可实现无传感器的简单结构和控制律)。另外,与带减速器的马达相比,反向驱动性(致动器输出侧受到的力传递到输入侧的性质)优异,本质上安全性较高。
(3)人工肌肉的形状自由度比较高,因此可应用于不同结构的设备。
(4)部件数量少,原料成本低。
文:JST客观日本编辑部翻译整理