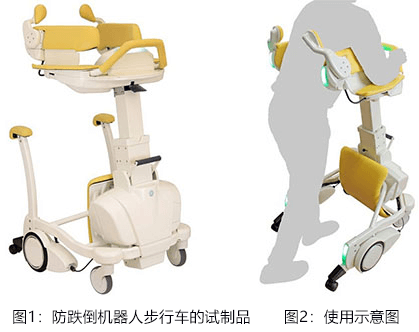
日本幸和制作所与日本产业技术综合研究所(简称产综研)合作,开发出了具备防跌倒功能的机器人步行车。
以往的步行车都未配备防止用户跌倒的功能,存在从步行车上跌落和步行车整个侧翻的风险。新开发的步行车通过模拟跌倒动作进行设计,配备了通过抑制跌倒的初始动作来防止跌倒的机构。防跌倒机构的有效性已通过假人模型测试进行了验证。
在护理设施等场所,存在跌倒风险的被护理者移动时大多使用轮椅,导致需要高度护理的“被动瘫痪在床”患者的数量增加。利用此次开发的步行车,存在跌倒风险的被护理者也可以安全行走,有望实现防止护理等级升高的自立支援护理、抑制护理费用的增加。预计2021年2月前投入实用。
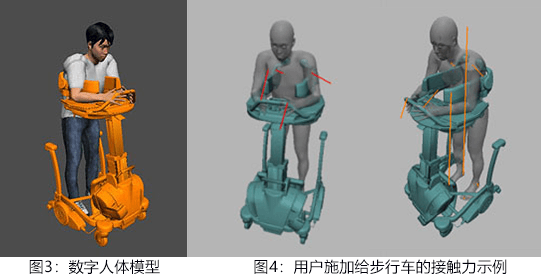
研究团队利用数字人体模型,改变使用者在步行车前的相对站立位置和姿势,并解析了使用者施加给步行车的接触力和力矩,评价了在最不稳定的状态下,步行车的车轮是否会离开地面,以此为基础设计了步行车的重量。图3为仿真模型,图4左侧是给步行车施加非对称力,右侧是步行车和地面反馈给使用者的力的示例。数字模拟工作由产综研负责。
操作性方面,将左右驱动轮配置在使用者脚部附近,使两个轮子以脚的位置为中心逆向旋转便可以转弯,这是通过对两个轮子进行动力辅助实现的。动力辅助是通过检测车轮速度进行扭矩控制实现的,通过检测地面倾斜来控制左右轮的平衡。
跌倒与使用者的重心在地面的投影点从支撑基底面的中心向边界偏移有关,此次开发着眼于这一点,开发了抑制这种重心偏移的初始移动的机构。该机构靠近但不接触腋下,在环绕上半身的同时,为防止用户向后跌倒,还对后背提供支撑,是对6种跌倒模式都有效的防跌倒机构。驱动轮的设计和动力辅助以及防跌倒机构均由幸和制作所开发。
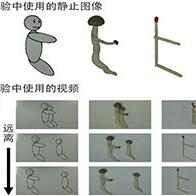
此次开发中制作的假人,身体各部位的尺寸、重量分配及关节可动区域都是根据老年人的测量统计信息设计的,全身拥有33个以上的自由度。除了可以改变膝盖等关节的硬度实现独自站立的姿势外,还着眼于使用步行车时跌倒的情况,为了再现从步行车中间滑下去跌倒的动作,没有在腋下设置机械卡锁。
利用假人的跌倒实验如图5所示。图6是以重心后仰姿势实施跌倒实验时,重心在地板上的投影点轨迹。可以看出,左侧是采用第1次的试制品时,随着假人向后倾倒,步行车也向后移动,假人的重心投影点停留在支撑基底面内,而在右侧利用普通步行车实施的实验中,随着假人向后倾倒,步行车被脚推向前方,假人的重心投影点移动到支撑基底面外,从而造成假人跌倒。
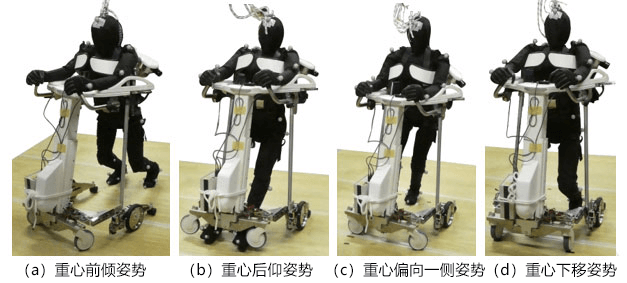
图5:利用假人实施的跌倒实验
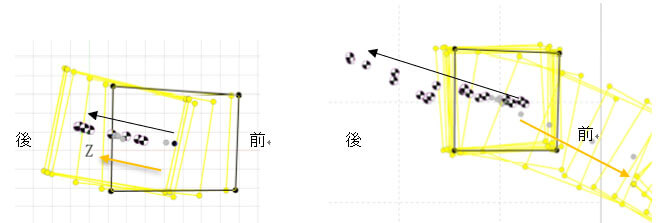
图6:重心移动轨迹(黑白点是重心投影点,黑框是支撑基底面的初始位置,黄色为其轨迹)(左)此次开发的步行车,(右)普通的步行车
文:JST客观日本编辑部翻译整理