日本大林组公司为实现让重型建筑机械的操作人员在作业时能感受到重型机械接触物体的力、动作和触觉,把与庆应义塾大学理工学部系统设计工学科专任讲师野崎贵裕共同开发的 “真实触觉”(Real Haptics)力触觉再现技术,应用到了液压驱动式重型建筑机械上,并实际验证了其性能和操作性。

佩戴手套式装置的验证实验
“真实触觉”是庆应义塾大学全球研究所特任教授大西公平发明的“双向传输现实物体与周边环境的接触信息,再现力触觉技术”。通过传输人类触碰物体时感受到的软硬度、气球般的弹力及自主动作等力触觉信息,可以在远处的操作者手上再现同样的力触觉。
另外,“真实触觉”与其他触觉技术不同,利用的是机械驱动部所承受的反作用力,因此特点是只需使用很少的触觉检测传感器即可,还适合用于对传感器来说非常恶劣的外部环境。此外,由于能任意设定操作侧和驱动侧的“力的倍率”和“距离倍率”,即使操作侧的手受力很小或轻微移动,也能以放大数倍的力操作驱动侧。
该技术与在室外环境下操作重物的重型建筑机械兼容性比较强,不仅如此,对于仅依靠通过视觉和听觉获得的信息进行操作的操作人员来说,通过引进和利用力触觉技术,还有望提高作业安全性和效率,因此大林组与庆应义塾大学为了在重型建筑机械上应用“真实触觉”技术,于2018年开发了适合液压驱动控制的算法并推进了系统化。
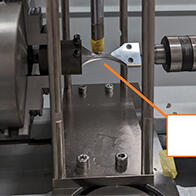
此次,大林组将开发的系统应用于液压挖掘机,实施了验证实验。驱动侧安装了抓斗的液压挖掘机将“力倍率”设定为2,000倍,“距离倍率”设定为16倍,然后根据操作侧的指示操作抓斗,抓取了试验体。试验结果显示,针对厚度为0.5mm的薄钢管、H形钢材和木材等10种特性各异的建筑材料,均在操作人员的手上再现了力触觉,连非常容易变形的薄钢管也在没有受损的情况下成功抓取并搬运。另外,还针对操作侧的指示,测量了驱动侧的位置、加速度和力等3项要素,并对数值进行比较,定量确认了驱动侧是按照设定的倍率运行的。
此外,大林组还在无“真实触觉”的状态下实施了同样操作的对比实验。操作人员为避免物体变形,要一边用眼睛确认一边慢慢抓取,所需的时间比较长,由此确认,通过感受力触觉能提高作业效率。另外还确认,向现有的液压驱动式重型机械追加配备该系统并不会花费太多费用和时间。
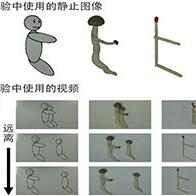
考虑到实验时的实用性,大林组为操作侧开发了控制杆式和手套式2种装置。利用控制杆式的话,操作人员可以边感受力触觉,边通过最佳力度抓取建筑材料,不仅如此,还能维持抓取力度。手套式采用机器人的远程操作也使用的装置,由于手部动作与实机的抓斗动作是同步的,即使是还没习惯操作重型机械的人也能凭感觉操作。

手套式装置
实验视频
文:JST客观日本编辑部翻译整理