日本新能源产业技术综合开发机构(NEDO)推进了“新一代人工智能与机器人核心技术开发项目”,此次与横滨国立大学共同开发出了小型、高效、高功率的机器人用致动器。
这款致动器在即使设定超高减速比也能逆向驱动的“双向驱动齿轮”中嵌入了电机和电机驱动器,实现了模块化,并且在啮合齿轮时的齿面间成功消除了游隙(无侧隙化)。
采用该致动器的机械臂可以精确控制关节,针对外力能灵活动作,而且可以将减速器造成的能源损失降到10%。

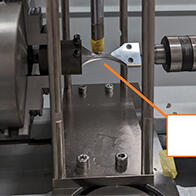
图1:新开发的机器人用致动器
NEDO于2015年度启动了“新一代人工智能与机器人核心技术开发项目”,该项目并没有止步于目前的人工智能(AI)和机器人技术的拓展开发,而是推进了旨在超越人类能力的创新性要素技术开发,其中,横滨国立大学推进了“具备高效率和高减速齿轮的高功率致动器研发”。
在该项目中,横滨国立大学2018年度开发了即使在超高减速比下也能逆向驱动的双向驱动齿轮。当时开发的双向驱动齿轮,一对齿轮啮合时,齿面之间存在游隙(侧隙),不适合精确控制位置的用途。因此,此次新开发了啮合齿轮时齿面之间没有游隙(无侧隙)的双向驱动齿轮(2号机),另外,通过在齿轮中嵌入电机和电机驱动器实现模块化,成功开发出了小型、高效、高功率的机器人用致动器。该致动器可以发挥高效率的特征,根据需要配合任务自由连接多个单元来构筑机械臂,能构建灵活的系统。
采用该致动器的机械臂,关节针对外力能灵活移动,另外,由于减速器的驱动效率比较高,还可以大幅削减能源损失,不仅如此,通过把逆向驱动在制动时产生的动能作为电能有效回收,可以将反复动作时的耗电量削减80%左右,还能根据电机的传感器信息推算负载扭矩。
由此能同时实现位置的精确控制、小型轻量化和节能,今后有望广泛应用于协作机器人、辅助机器人、移动机器人和工业机器人等的关节部件,以及纯电动汽车(EV)和电动自行车等。

图2:致动器模块及连接这些模块的机械臂

图3:辅助机器人
右腿:有外壳 左腿:无外壳
文:JST客观日本编辑部翻译整理