日本信息通信研究机构最近成功完成了一项实验,可避免同时飞行的多架无人机过度接近。为了使包括无人机在内的多个飞行体在同时飞行时实现安全航行,通过无人机之间的直接通信,利用共享位置信息的系统“无人机测绘仪”对飞行进行控制,最多能控制3架无人机自动避免与靠近的其他无人机过度接近。
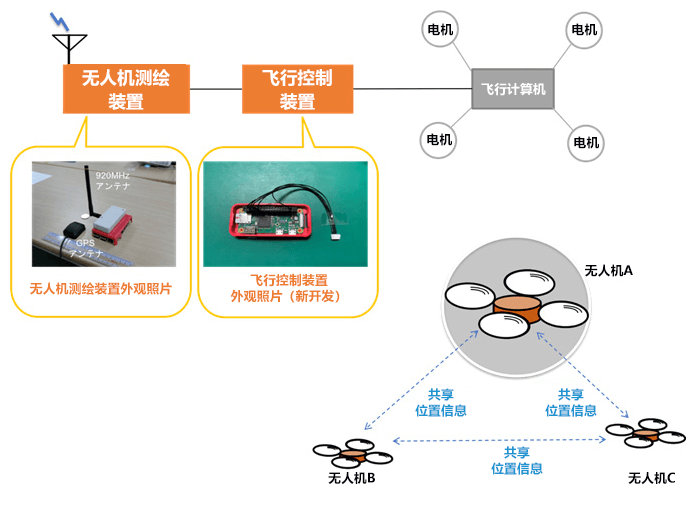
图1:连接无人机测绘仪和飞行控制装置的无人机结构图
无人机在视线范围外飞行时,以前采用的飞行控制方法是,让操纵者与无人机之间保持通信的同时,使无人机按照提前设定的飞行路线和飞行方法自动飞行。但这种飞行控制方式存在问题,比如难以应对其他无人机和载人飞机等的接近情况。
为了让无人机测绘装置与无人机飞行计算机联动,此次专门开发了飞行控制装置。该飞行控制装置根据无人机测绘仪共享的周边无人机的位置信息来检测接近情况,然后根据周边接近的无人机的飞行方向等,向无人机输出指令,控制该无人机的飞行速度和飞行方向。在该系统中,无人机之间根据相互直接共享的位置信息来控制飞行,因此无需操纵者操作,无人机就可以自动避免与其他无人机接近,还能自动追随其他无人机飞行(图1)。
为了评估新开发系统的性能,信息通信研究机构为不同操纵者操作的多架无人机配备了无人机测绘仪和飞行控制装置,并于2018年12月17日及18日在日本埼玉县秩父市的某广场实施了验证实验。本试验首次在实际的飞行环境中确认,通过无人机之间的直接通信,可以根据彼此的位置信息检测接近情况,当彼此之间的距离在40m左右时,就会自动采取行动避免过度接近,在保持安全距离的情况下到达目的地。图2是3架无人机各自单独飞行时自动避免过度接近的照片,图3是1架单独飞行的无人机与3架编队飞行的无人机(3架无人机利用以往的技术,通过经由地面站的飞行控制进行编队飞行)自动避免过度接近时的照片。图4是两架单独飞行的无人机自动避免过度接近时的飞行轨迹(基于无人机测绘仪取得的位置信息的轨迹)。
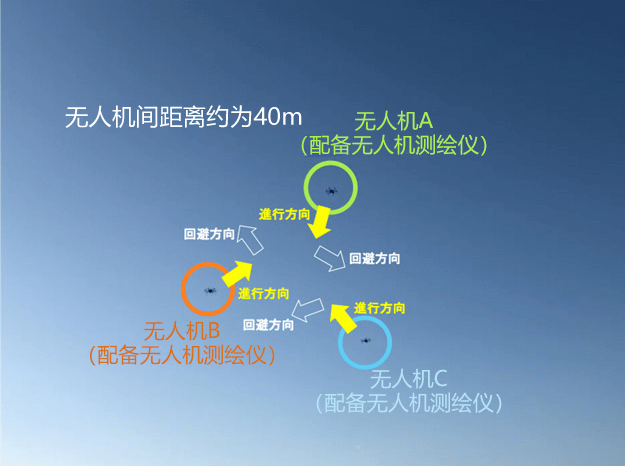
图2:飞行控制试验(3架无人机单独飞行时自动避免过度接近的情形)
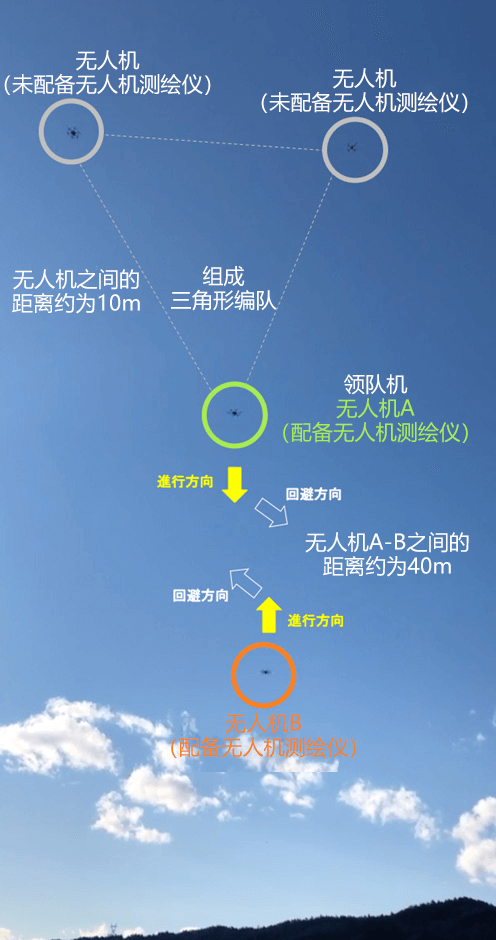
图3:3架编队飞行的无人机(仅领队机配备无人机测绘仪和飞行控制装置)与对面1架无人机相互避免碰撞的情形
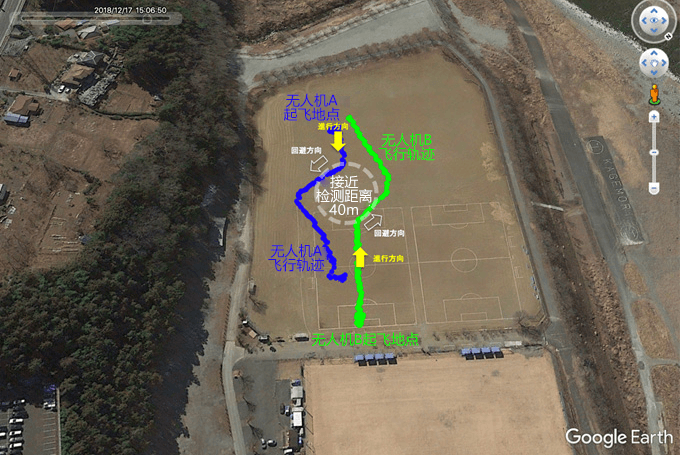
图4:1对1回避飞行的轨迹(利用无人机测绘仪取得的位置信息)
文 JST客观日本编辑部
日文发布全文 [网址]