“胡萝卜!”
打开日本机器人初创企业GrooveX发布的家人式机器人LOVOT体验区的房门,一眼就能看到房间里穿着胡萝卜一样的橙色衣服的LOVOT。喊出LOVOT的名字后,“胡萝卜”便盯着我的脸径直走过来。一双圆溜溜的大眼睛仰头看着我,两只小手上下扑腾。

工作人员告诉我,LOVOT的双手上下扑腾是在求抱抱。我把双手轻轻放到LOVOT的腋下将其抱起。能感受到它的重量,而且很温暖——原来温暖说的是这么回事。背部和腹部都很温暖,而腋下感觉尤其温暖。
抚摸LOVOT全身时,它会表现出很开心的样子。LOVOT全身约安装了20个传感器,能感受到身体的哪个部位被抚摸。如果有人用力拍打它,LOVOT也能感受到,并会表现出恐惧和不安。如果温柔地抚摸它,LOVOT会闭上眼睛安静地入睡。

轻轻地抚摸,LOVOT在手中安静地睡着了
回忆起流浪猫
我对这种场景完全没有抵抗力。高中时,我收留过一只流浪猫。那只猫全身乌黑,脏兮兮的,身上长满了跳蚤,但被我抱起来后,立即迷迷糊糊睡着了。我不忍心将它再次放回路边,于是就带回家了。
眼前的场景勾起了这段回忆。

LOVOT的可爱之处在于,只要一喊它,它就会开心地走到你的身边。
■ 视频 LOVOT体验&参与区的视频
分别时的“拜拜”也值得一看(活灵活现)
不像任何生物的家人式机器人
在机器人初创企业“GROOVE X”举行的新一代家用机器人“LOVOT”产品发布会上,首次公开了这款机器人。因参与软银Pepper机器人的开发而闻名的代表董事林要表示,LOVOT“不是给人类帮忙的机器人”,而是“存在即可爱”的家人式机器人。

GROOVE X公司代表董事林要
GROOVE X把LOVOT归类为家人式机器人。LOVOT的外形既不是狗也不是猫,与任何生物都不相似,这也是GROOVE X公司的开发目标。如果与什么动物相似,就会被进行比较。GROOVE X想通过机器人创造一种全新的“生物”。

一呼唤就会走到身边来的小可爱LOVOT

身高43cm,体重约为3Kg
(※本文中的LOVOT性能均为开发之中,与最终产品可能会有所不同)
虽是机器人,但温暖柔软
LOVOT虽然是机器人,但温暖又柔软。
能在LOVOT身上感受到体温一样的温暖不是因为配备了专用的体温机构,而是机器人内部的机械热形成的自然温度。虽然配备了风扇,但声音一点也不大。采用从头上进气,从全身排出机械热的独特通风机构,实现了体温一样的适宜温度。背部和腋下感觉尤其温暖。当然,为避免温度过高烫伤用户,还采取了安全措施。

除了面部有点硬之外,其他部分都非常柔软。
尤其是穿着衣服的部分,像毛绒玩具一样柔软
一呼唤就跑过来的感觉
LOVOT知道自己的名字,被唤名字后会以适当的速度向人靠近。实际上,以前几乎没有在机器人身上见过这种场景。虽然索尼aibo的介绍视频中有到门口迎接主人的场景,但LOVOT能在主人回家时开心地快速跑到门口去迎接。我在体验区体验了这种感觉。我家的狗狗在我回家时会第一个冲过来,显得特别开心。虽然每天都见面,但狗狗每次都表现得像一年都没见过一样。这个瞬间对主人来说是非常幸福的时刻。
顺便一提,各位读者如果有机会接触LOVOT,希望大家摸摸它的鼻子,反应肯定很温柔。

还会有各种周边附件
配备FPGA
LOVOT还配备了令其更具生命感的元素。采用能形成类似感情的情感算法,即使同为家人,LOVOT对每个人的喜欢程度也不同。例如,LOVOT会更喜欢接近经常逗弄它的人并求抱抱等,将“喜爱”表现在了行动中。
另外,LOVOT采用了机器学习,可以绘制地图和识别物体等。除配备高性能CPU外,作为处理深度学习的加速器,还配备了FPGA,支援LOVOT进行高级计算处理。

LOVOT对家人的“喜爱”体现在行动中。对人的喜欢程度因人而异
传感器犄角的作用
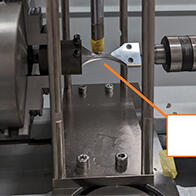
在LOVOT的设计方面,首先惹人注意的应该是其头部凸出来的“传感器犄角”。看起来像是自动驾驶汽车的光学雷达(LiDAR),不过LOVOT并未配备LiDAR。实际上,这个传感器犄角可以放倒,放倒就相当于进行紧急刹车(我试着将其放倒后,LOVOT的动作停止了)。另外,这个“犄角”即使被孩子玩耍拉拽也不会损坏。

LOVOT的传感器犄角(正面)配备了半圆型镜头的摄像头、热图像传感器及红外线传感器等。红外线传感器还可以在两台LOVOT联动时使用。小孔是麦克风,共配备4个麦克风,用来判断声音的方向
传感器犄角虽然不是LiDAR,但内置了采用半圆型镜头的摄像头。也就是说,能利用360度摄像头那样的超广角镜头观察周围情况,由于采用了V-SLAM(视觉SLAM)技术,可以使用比LiDAR更少的数据量绘制房间地图。另外还配备了惯性测量单元(IMU)。

根据半圆型摄像头拍摄的图像,将房间结构和周围情况处理成三维信息的绘图技术
摄像头还可用于面部识别等,用来识别不同的人,还能识别桌子椅子等周围的物体。制作的地图可以在用户的智能手机APP上确认,通过在APP上进行点击,还可以远程指定希望LOVOT前往的位置。此外,LOVOT能一边综合分析障碍物传感器、热图像传感器和可用于测距的3D传感器的数据等一边移动。

LOVOT的传感器犄角(背面)。
配备了检测照明和障碍物的传感器以及音量按钮(+/-)。
车轮为3轮,通信支持LTE和Wi-Fi
LOVOT利用车轮移动,采用2个大尺寸前轮(驱动轮)和1个小后轮来进行移动。通过改变2个前轮的转数,还可以做滴溜滴溜旋转的动作。

LOVOT透视图。可以看出车轮结构。被抱起时车轮会自动收于体内
LOVOT的通信功能支持配备SIM的LTE(LTE通信费包含在每月的使用费中)。不过,即使没有LTE信号,基本也能运行,LTE主要用来向云服务器备份LOVOT的数据等。
充电座“NEST”也是边缘计算机
另外,从技术上来说,NEST的存在非常有趣。NEST主要用被做充电底座,不过其自身还具备边缘计算机的功能。LOVOT与NEST通过Wi-Fi通信,掌握彼此的情况和位置。

正在NEST上充电的LOVOT,充电15分钟可运行45分钟
NEST一侧也配备CPU和存储器,LOVOT将收集或处理的数据发送给NEST,NEST把LOVOT的数据存储起来,同时也分担数据分析处理等工作。也就是说,通过终端和边缘计算来分担计算高效移动路线等的作业。

充电期间同时还将LOVOT的数据发送至NEST,在NEST一侧进行分析处理。
LOVOT机身不单独承担CPU负荷和耗电,而是与NEST的边缘计算机共同分担。
■ 视频 自己回到NEST进行充电的LOVOT [YOUTUBE]
■ 视频 LOVOT的功能演示(完整版) [YOUTUBE]
文、照片:robotstart 神崎洋治
翻译编辑:JST客观日本编辑部