长崎大学海洋未来创新机构的山本郁夫教授等人组成的研究团队于9月9日宣布开发出了通过自立式船舶机器人(ASV)与遥控式水下机器人(ROV)的联动,可以在渔礁以及海面、海中和海底调查海洋垃圾的船舶机器人。以往调查海洋垃圾都是人工进行的,利用新开发的机器人有望实现更有效的调查。计划在10月前后在长崎县对马市实施验证试验。
新开发的船舶机器人机具有出色的运动性能,可以原地转弯,并配备水上和水下相机。水上相机可以360度旋转,能自动拍照并将拍摄的图像实时发送到地面上。水下相机拍摄的视频可用来创建渔礁、海面、海中和海底的3D模型。
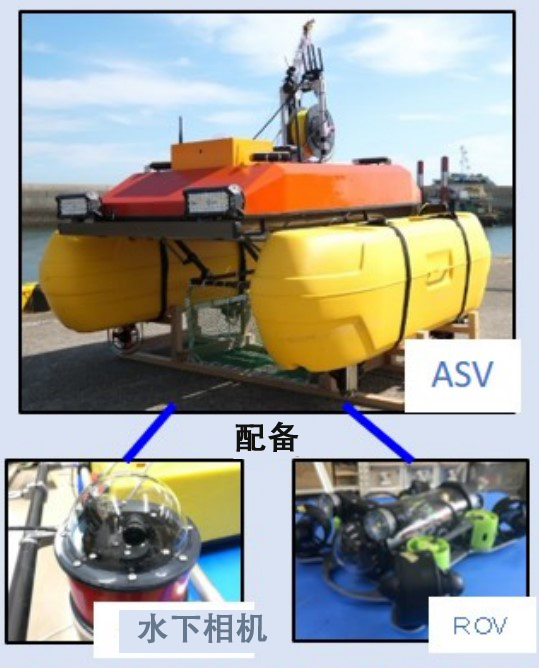
图1:新开发的调查船舶机器人(图片由长崎大学山本郁夫教授提供)
新开发的船舶机器人可利用船上的线缆与能独立航行的ROV连接。虽然可以在任何深度使用,但目前设想先对海岸线附近进行调查。除了回收微塑料,还考虑用来回收导致赤潮的有害浮游生物。
此前山本教授开发了多种机器人,包括用于基础设施检查为首的船舶机器人(KENBOT)、海洋机器人和飞行机器人。此次开发的船舶机器人也是以这些机器人为基础,作为KENBOT系列开发的。
以前没有尝试过使用船舶机器人进行海洋监测,预计新开发的船舶机器人不仅可用于对海洋垃圾实施多方面的调查,还有助于检查海洋构造物。
船舶机器人开发在国土交通省的“关于新一代海洋交通工具利用的实证项目”下进行的。
验证试验预定于10月份联合对马CAPPA、梦想科学和对马市四方共同实施。
山本教授表示:“海洋垃圾中还有微塑料,因此从大型垃圾到微塑料,我们希望都可以利用此次开发的船舶机器人为解决海洋垃圾的问题做贡献”。
原文:《科学新闻》
翻译编辑:JST客观日本编辑部