日本理化学研究所(简称“理研”)开拓研究本部的专任研究员福田健次郎和主任研究员染谷孝雄、早稻田大学大学院创造理工学研究科教授梅津信二郎、新加坡南洋理工大学副教授佐藤裕崇等组成的国际联合研究团队,开发出了一种全长约6厘米的半机械昆虫(马达加斯加蟑螂),它可以通过贴在其身上的有机太阳能电池的电力进行操作。相关论文已发表在《npj Flexible Electronics》网络版上。

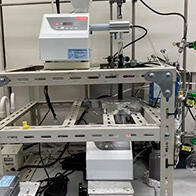
可充电的半机械昆虫(马达加斯加蟑螂),身长约6厘米(供图:理化学研究所)
研究人员将超薄有机太阳能电池模块粘在机械蟑螂的腹部,并将3D打印出来的背包粘在其胸部,里面装有无线运动控制模块和电池。当控制端通过电信号发出“右转、“左转”等指令时,会对其尾叶(尾部的感觉器官)施加电刺激,从而控制行进方向。
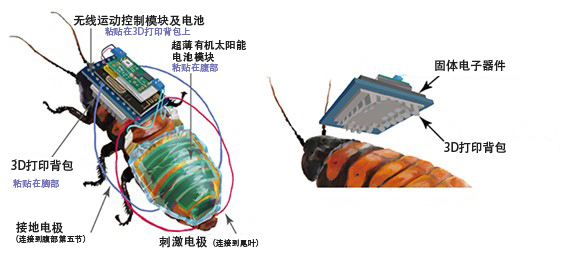
图1 半机械昆虫的概要及3D打印背包(供图:理化学研究所)
(左)在昆虫腹部的背侧粘贴超薄有机太阳能电池模块,通过柔软的背包将无线运动控制模块和电池(锂聚合物电池)粘贴在其胸部的背侧。为了向昆虫输入刺激信号,控制运动的刺激电极是用银线连接到名为尾叶的感觉器官上的。
(右)用3D打印机制作的软背包采用柱状构造,其形状来自昆虫胸部背侧的曲面,能适应不同蟑螂之间的个体差异,电子设备可以稳固地安装在不同的个体身上。
昆虫在移动时腹部会发生变形,导致腹节有部分重叠,因此在将聚合物薄膜上制作的超薄型有机太阳能电池(3μm厚)贴在腹部背侧时,采用了交替配置粘接剂区和非粘接剂区的踏脚石构造。在进行障碍物翻爬实验时发现,该构造可以保持与没有粘贴电池板时相同水平的翻爬性能。
此外还通过实验确认,昆虫从翻倒状态恢复到正常状态的爬起能力会随着薄膜变厚而降低,但是粘贴踏脚石构造的超薄有机太阳能电池后,翻身成功率与没有粘贴时基本相同。
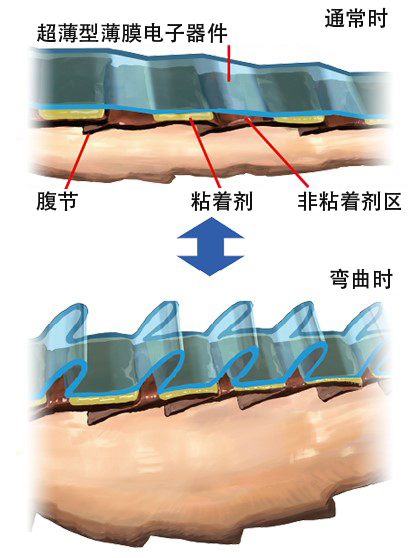
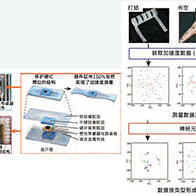
图2 超薄有机太阳能电池安装于腹部(供图:理化学研究所)
通过采用粘接剂区和非粘接剂区交替的踏脚石构造,薄膜保留了一定程度的变形自由度,当腹部弯曲时薄膜能向外侧弯曲。
粘贴的超薄型有机太阳能电池模块的有效面积为3.96平方厘米,最大输出功率达到17.2毫瓦。
试验证实,对活的半机械昆虫照射模拟阳光充电30分钟后,发现可以进行约2分钟的连续无线通信,并确认到实际可以按照指示左右移动。
福田专任研究员介绍说:“机器昆虫的课题在于需要大量的电力才能操作,但如果使用活体,就能以节能的方式控制昆虫。此次的无线移动控制模块和电池是手工制作的,所以体积很大(6.5克)。但将来我们希望可以做得更薄更小,并安装各种传感器,使其能够用于灾害时从废墟中寻找需要救援的人等用途。”
原文:《科学新闻》
翻译编辑:JST客观日本编辑部
【论文信息】
杂志:npj Flexible Electronics
标题:Integration of body-mounted ultrasoft organic solar cell on cyborg insects with intact mobility
DOI:10.1038/s41528-022-00207-2