日本新能源产业技术综合开发机构(NEDO)与熊本大学合作,针对需要与人物理性接触的机器人,为使其能安全工作而开发了机器人皮肤传感器,该传感器具有与人类的皮肤感觉相同的性能(图1)。

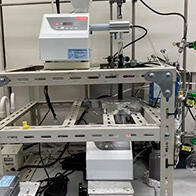
图1:在加工成凹面形状的基材上涂覆压电膜,以及制作的柔性薄型压电膜器件
在本次开发中,研究小组改良了以往的喷涂喷雾技术,确立了长时间喷涂喷雾的技术和喷枪自动驱动系统,成功形成了均匀且再现性良好的大面积压电膜。由此,通过在各种不同形状和尺寸的机器人表面喷涂压电压力传感器,便可制作皮肤传感器。
配备该传感器后,与人协作型机器人可以安全地工作,增加了社会应用的可能性。其他用途方面,利用该技术在移动产品、日用品、汽车及机翼等不同形状和尺寸的对象的表面喷涂压电压力传感器,可测量表面压力分布和振动;利用制作的压电膜的耐热冲击性,即使在超高温下也能对特殊形状的物体实施超声波无损检测。
【成果1】确立溶胶-凝胶喷涂法的连续涂覆工艺
溶胶-凝胶喷涂法主要用来制作超声波探伤用换能器(Transducer),以往的工艺涂覆面积比较小,无法用于机器人和大型设备。所以,研究小组确立了能扩大溶胶-凝胶喷涂法的制作工艺面积的连续涂覆工艺(连续溶胶-凝胶喷涂法)。将该连续溶胶-凝胶喷涂法应用于自动涂覆装置进行验证后,确认即使大面积也能均匀制膜。此次确立的方法原则上对涂覆对象的基材尺寸没有限制,可以实现大面积均匀涂覆(图2)。
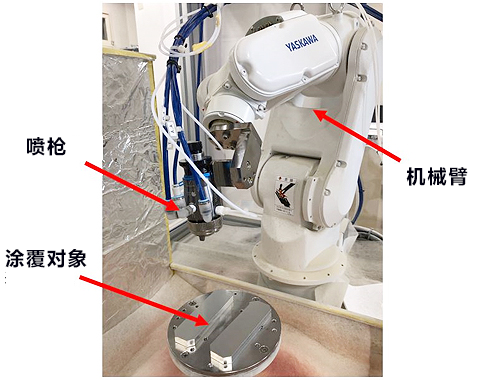
图2:利用连续涂覆工艺实施曲面涂覆的机械臂式涂覆装置
【成果2】验证压力传感器的特性
研究小组利用上述连续喷涂工艺制作了压电器件,并评价了压敏特性。经验证确认,可以实现与人类触觉中最敏感的指尖同等水平的1mm空间分辨率;可以检测到人类皮肤能感受到的几Hz至1kHz的振动,而且平均灵敏度为25mV/N(图3);针对人类皮肤几克重的平均压觉,也能充分输出信号。
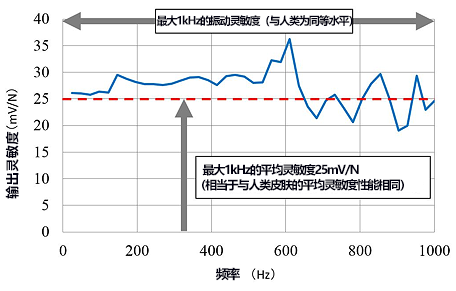
图3:不同频率对压力分布传感器的力输入的灵敏度
【成果3】验证压力分布测量传感器的制作工艺
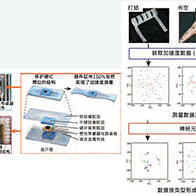
要想实现本项目瞄准的高精细压力分布测量,需要高密度配置电极和布线。这种情况通常采用以垂直和水平方向排列的电极布线图案夹住压电膜的矩阵阵列结构(如图4)。此次成功地在具有下部电极图案的绝缘基板上涂覆和烧制了压电膜。另外还在该压电膜上形成了上部电极图案,成功地从上下电极的交点处获得了输出。
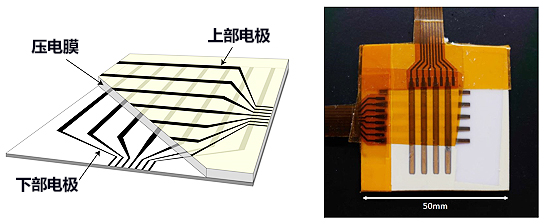
图4:获得压力分布情况的矩阵阵列结构和试制的传感器

图5:利用溶胶-凝胶复合压电传感器检测脉搏(左)和实施超声波探伤(右)
文:JST客观日本编辑部翻译整理