桥本 稔AssistMotion公司代表董事 |  |
随着人口老龄化的发展,我们正在开发可以辅助老年人和残疾人行动或者延长健康寿命的人类友好型步行辅助机器人curara®,并将其商业化。目标是实现即使是老年人或残疾人也都能用自己的脚走路的社会。下面为大家介绍一下这款机器人的概要、开发经过以及商业化的现状和课题。
■ 还适用于康复训练和登山运动
已经进入超高龄社会的日本正面临着老年人占比持续增加带来的社会保障费用激增,以及从事医疗和护理人才不足的严重课题。为了解决这些问题,需要在延长健康寿命的同时,建立让老年人可以利用支援技术独立生活的社会。AssistMotion公司的目标是,利用机器人技术为老年人等行动不便的人或者想预防这种情况的人提供支援,从而建立一个人人都独立、平等(Equal)的社会。如果以创新(Innovation)和保守(Conservative)为纵轴,以人类(Human)和机械(Mechanical)为横轴,那么本公司的目标行动指南就是高度发展位于第二区域的 “人类友好型可穿戴机器人”(Human Friendly Wearable Robot),推出能真正被人们接受的机器人(图1)。
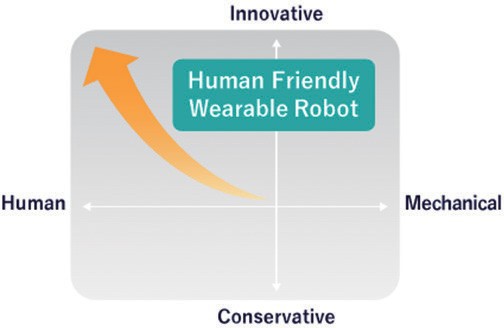
图1:本公司的目标行动指南
随着超高龄社会的发展,利用可穿戴机器人技术辅助人类行动的技术今后应该会变得越来越重要。为了广泛应用于各个领域,不仅仅是辅助人类行动,实现通过提高与人类的亲和性并诉诸于感性来吸引人使用的机器人也非常重要。为此,我们正以人类友好型可穿戴机器人(可穿戴机器人curara)和新一代软致动器(聚氯乙烯(PVC)凝胶人工肌肉)的研发为两大支柱,推进可穿戴机器人的实用化。
目前正连同显示屏一起出租图2所示的可穿戴机器人curaraWR-P。这款机器人可以辅助走路,用于为医院的康复训练和护理设施等的身体机能训练提供支援。此前已经让很多医院、护理设施和个人等试用过,现在正根据这些用户反馈的意见开发产品模型。另外,步行支援功能可应用于广泛的用途,比如实施康复训练、支援独立生活、延长健康寿命、参加无障碍旅行(Universal Tourism)、进行登山运动等,今后考虑扩大应用范围。

图2:可穿戴机器人curara
■ 作为信州大学的初创企业于2017年成立
本公司是为了利用信州大学取得的研究成果为社会做贡献而成立的信州大学校办初创企业。信州大学为了帮助老年人等难以独立行走的人进行康复训练以及独立生活,从2008年开始研发可以温柔地贴近人类的支援日常生活的机器人“curara®”。可穿戴机器人curara®以控制人与机器人交互的技术为基础技术,在国立研究开发法人科学技术振兴机构(JST)的A-STEP种子培育型项目的支援下从2011年开始研发。之后在信州大学先端研究群的步行辅助赛博格项目、国立研究开发法人日本医疗研究开发机构(AMED)的医疗器械开发推进研究项目、东京都立产业技术研究中心的机器人产业振兴项目、AMED的机器人护理设备开发和标准化项目,以及公益财团法人市村清新技术财团的新技术开发助成项目等的支援下推进了开发。另外,还得到了以长野县为中心的众多企业、医院和护理设施的协助。curara通过反复开发已经从零号机进化到第六代最新机型WR-P,在此过程中,为实现实用化,于2017年成立了AssistMotion公司。
■ 可利用锂离子电池连续工作1小时
curara在髋关节和膝关节合计安装了4个致动器,不仅是走路,还可以辅助人起立、落座和爬楼梯。腰部有安装了控制器和电池的盒子,包括致动器在内的总重量为4.5kg。可以利用平板电脑无线操控机器人。利用锂离子电池能连续工作约1小时。
这是一款非外骨架结构**1的机器人,没有采用连杆机构,因此可以削减机器人的重量,作为辅助4个关节的机器人,重量比较轻,穿戴时的束缚感也比较少。特点是能利用机器人辅助人自然行走。
控制法采用我们自主开发的同步控制法。通过利用脊髓中的中枢模式发生器的数学模型——神经振荡器(松冈模型)进行控制,可以根据穿戴者的节奏控制机器人。另外,动作配合强度称为同步性,通过调整同步性可以改变辅助强度。因此,可以控制关节轨迹,为穿戴者提供合适的步态。
目前已经确认,通过让脑卒中患者使用curara,与不进行控制时相比,走路速度、步幅和步频(步数/分钟)可以改善20~30%左右**2。另外,针对脊髓小脑变性症患者实施同样的实验确认,表示走路稳定性和顺畅性的指标Harmonic Ratio在curara的控制下升高并变得稳定**3。
■ 课题在于价格,期望降到护理保险范围之内
此前一直在开发机器人技术并验证其效果,但为了使这类机器人实现商业化,今后还存在必须要解决的课题。虽然curara比其他步行辅助机器人便宜,但价格依然高达数百万日元。护理设施导入这种昂贵设备的难度很大,老年人单独购买就更困难了。虽然也有制定了一定的导入补贴制度的地方政府,但额度有限,护理设施依然很难导入。为了解决这些问题,希望政府能扩大补贴制度以及为这类机器人能够被护理保险所覆盖。
■ 通过PVC凝胶人工肌肉降低价格,进一步减轻重量
本公司打算利用第二大支柱技术PVC凝胶人工肌肉来减轻可穿戴机器人的重量并降低其价格。为了让每一个有需求的人都能利用可穿戴机器人,需要大幅减轻其重量并降低价格。PVC是用于地板和水管的材料,价格便宜,如果能实现,无疑会成为可穿戴机器人的核心技术。如图3所示,我们的目标是实现可以像穿衣服一样利用的可穿戴机器人并实现商业化。

图3:采用人工肌肉的运动服
【参考文献】
**1:水上、桥本:与人融合的机器人;机械研究, Vol. 69, No.2, pp.93--101 (2017)
**2:Mizukami N, Takeuchi S, Tetsuya M, Tsukahara A, Hashimoto M, Yoshida K, Matsushima A, Maruyama Y, Tako K. Effect of the synchronization-based control of a wearable robot having a non-exoskeletal structure on the hemiplegic gait of stroke patients. IEEE Trans Neural Syst Rehabil Eng 26 (5): 1011-1016, 2018. (doi: 10.1109/TNSRE.2018.2817647)
**3:Tsukahara A, Yoshida K, Matsushima A, Ajima K, Kuroda C, Mizukami N, Hashimoto M. Effects of gait support in patients with spinocerebellar degeneration by a wearable robot based on synchronization control. J NeuroEng Rehabili 15: 84, 2018. (doi: org/10.1186/s12984-018-0425-4)
文:桥本 稔 AssistMotion公司代表董事
原载自《产学官合作月刊》,2021年7月号
翻译编辑:JST客观日本编辑部