日本东北大学研究生院工学研究科的大胁大副教授、鹤冈市立加茂水族馆的池田周平饲养课系长、奥泉和也馆长,以及东京大学研究生院情报理工学系研究科的Austin Max Philip特任助教、中嶋浩平副教授等人的研究团队,成功开发出了通过对水母肌肉施加电刺激诱导其游动,并利用简易人工智能(AI)预测其运动的技术。这一成果有望推动用于海洋调查和环境保护的自律型赛博格机器人的开发。相关研究成果已发表在《Nature Communications》5月23日刊上。
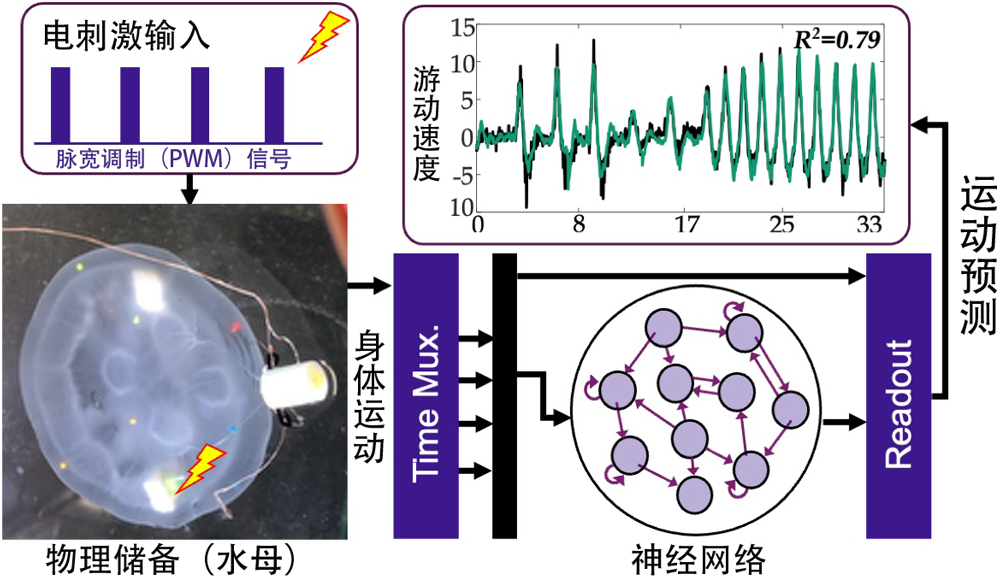
图1. 水母混合计算系统的运动预测示意图(供图:日本东北大学研究生院工学研究科大胁大副教授,版权所有大胁大副教授)
将生物所具备的卓越运动性能和环境适应能力融入人工系统的生物赛博格技术备受关注。这类系统的实现,离不开能与生物神经、肌肉、感觉器官联动的电子控制系统的构建。
广泛分布于日本沿海、在水中具有高效运动性能的水母,通过节律性摆动伞状身体产生推进力来游动,且具有自主改变行进方向的能力与自我修复功能。
虽然此前已有研究尝试将电子控制与真实水母融合在一起的“水母赛博格”,但仅能实现速度控制,尚未能诱导复杂的旋回运动或预测其动作。要实现这一目标,需要理解水母与流体的复杂相互作用而产生的运动,以及自发神经活动与外部刺激之间的关系。
对此,研究团队以开发出利用水母天然“身体性智能”的新型赛博格技术为目标推进了开发。
研究团队首先利用水母柔软的身体与水环境的相互作用,构建了可预测和控制高效灵活运动的系统。通过在水母的环状肌中插入电极,并利用脉宽调制信号模拟生物神经信号来施加电刺激,诱发水母的肌肉收缩,以此再现了接近自然状态的浮游行为。
接下来,为了精确测量和预测水母的运动,研究团队还开发出三维运动捕捉系统。该系统可采集水母的身体变形、移动速度以及详细的浮游轨迹等运动数据。
研究团队在水母体内嵌入可反射紫外线的标记物,通过上方及镜面从三个方向记录影像。记录的数据经深度学习算法(DeepLabCut)解析后,被重构为三维运动模型。
通过上述一系列的研究,研究团队实现了在最佳时机给水母肌肉施加电刺激,获得了基于水母自发节律的游动诱导。
此外,研究发现水母游动的自发节律产生自组织临界现象。该现象指系统无需外部微调节即可自主过渡到临界状态的性质,在自然界中较为常见。
研究团队进一步应用了一种被称为物理储备计算的计算方法,将水母的自然运动作为“智能”的一部分加以利用,构建了用于预测其运动的AI模型。
通过活用生物原本具备的运动性能,有望开发出低功耗、低计算量驱动的赛博格机器人控制技术。
大胁副教授表示:“以水母为代表的生物,可能具备尚未被揭示的能力。我们希望致力于开发利用这些能力的可持续性赛博格技术。”
原文:《科学新闻》
翻译:JST客观日本编辑部
【论文信息】
期刊:Nature Communications
论文:Harnessing Natural Embodied Intelligence for Spontaneous Jellyfish Cyborgs
DOI:10.1038/s41467-025-59889-7