
2025年1月20日,是小型月球探测器“SLIM”实现日本首次着陆月球表面1周年的日子。SLIM不仅达成了世界首次高精度的“定点着陆”,它还熬过了3次无法发电的夜晚,并多次超出设计性能实现复活,在日本的科学技术史上留下了足迹。日本国立研究开发法人宇宙航空研究开发机构(JAXA)的负责人对完成使命后沉睡在月面的SLIM表达了深切的怀念:“它真的非常努力,通过它取得了巨大成果,非常感谢它。”另外,着陆前一台主引擎异常停止的原因现在也已查明。SLIM项目团队已于2025年1月1日宣布解散。

着陆前分离的小型机器人“LEV-2”拍摄的SLIM。着陆姿态未能实现原计划,而是侧翻静止状态,太阳能电池未能朝向上方而是朝向西面(右侧)。中央的横线为图像噪声(供图:JAXA、TAKARA Tomy、索尼集团、同志社大学)
实际误差实现了10米以内
SLIM是为了实现月面高精度着陆及通过小型轻量化机体验证探测技术两大目的而开发的。SLIM机体尺寸为高2.4米、长2.7米、宽1.7米,包括燃料在内的总重量约为700公斤,比以往1吨以上乃至数吨级的传统着陆器要轻得多。其名称“SLIM”为“Smart Lander for Investigating Moon(探测月球的智能着陆器)”的首字母缩写。
SLIM于2023年9月搭载大型火箭“H2A”从地球发射升空。2024年1月20日,它在月球低纬度平原“神酒之海”上靠近陨石坑的斜坡地带着陆。虽然着陆点比原定目标向东偏移了约60米,但仍成功实现了误差在100米以内的定点着陆目标。据介绍,如果排除自动避让月面岩石等障碍物以及引擎异常停止的影响,实际误差可控制在10米以内,这可以看作是实质误差。
在下降过程中,SLIM用摄像机拍摄了月面,并与过去印度绕月飞行器拍摄的月面图像进行比对,实时掌握机体的位置和高度,从而瞄准了着陆地点。这种“图像比对导航”的原理与数码相机的面部识别功能相同,只不过它不是以人脸,而是以月面的陨石坑等地形特征作为标志的。

在记者会上的坂井真一郎(2024年12月26日,摄于东京都千代田区)
在距离月面约50米高度时,两台主引擎中的一台发生异常停止了工作。受此影响,SLIM未能按计划平稳着陆,而是以侧翻的姿态落在了月面上,太阳能电池板未能朝向正上方,而是朝向了西面。由于电池板照不到阳光,机体不久后便停止了工作。然而,随着日照方向的变化,SLIM重新开始发电,并于2024年1月28日首次复活。它成功完成了光谱相机的科学观测任务,在空中分离的小型机器人也成功活动。此后,每当月面的夜晚来临,SLIM都会停止工作,但它在2024年的2月25日、3月27日和4月23日又三次复活。5月下旬之后SLIM便再无响应,最终于8月23日结束了任务。
在团队解散前的2024年12月26日,JAXA宇宙科学研究所的坂井真一郎教授(时任SLIM项目经理)在记者会上感慨地说道:“SLIM真的非常努力。”他说:“它飞越了38万公里,在着陆下降时,我们已经完全无法人工干预,只能在地面上默默守望。然而,SLIM自己做出了许多判断。即使主引擎发生故障,它也能自己察觉到发生了异常,并切换了模式。它为我们带来了巨大的成果。”
科学与开发应用,在瞩目中迎来的成功
通过SLIM项目,日本成为继前苏联(俄罗斯)、美国、中国、印度之后第五个实现月面着陆的国家。虽然前苏联于1966年首次成功,印度也于2023年8月抢先一步完成月面着陆,但日本此次的成就绝非简单的追赶。其最大的亮点在于,以低成本机体实现了对未来月球及行星探测至关重要的定点着陆技术。该项目的开发总费用约为149亿日元(包含部分发射费用和初期运营成本,约7.15亿元人民币)。
随着月球研究的深入,科学家对探测地点的精准性提出了更高要求。过去的探测器考虑到数公里至十余公里的误差,只能选择广阔的平原作为降落地点,而未来的探测器需要具备能够在预定目标地点精准着陆的能力。此外,有观点认为,月球极区陨石坑阴影区等无阳光照射的区域可能蕴藏大量水冰。这些水冰未来或可作为宇航员的饮用水或航天器燃料来源(当然也有观点认为其储量未必达到可利用的规模)。若需开发此类资源,探测器必须在靠近水冰且能接收阳光发电的有限区域内精准着陆。
在科学与资源利用双重需求高涨的背景下,SLIM成功实现了定点着陆,可以说是从“能降落的地方升级到了想降落的地方”。该技术在未来也有望应用于火星等行星及其卫星的探测中。
燃料滞留导致点火时冲击过大
关于其中1台主引擎异常停止的过程,调查结果如下。首先,(1)主引擎点火启动时,与12台姿态控制辅助引擎的喷射动作恰好重叠。这导致2台主引擎的燃料供给压力下降,其中1台因未能点火导致未燃烧的燃料在引擎内堆积;(2)约1秒后,随着辅助引擎同时停止喷射,主引擎燃料供给压力恢复;(3)此时,此前停止的主引擎终于点火成功。但由于堆积的燃料瞬间被引燃,导致点火冲击力过大。巨大冲击使主引擎喷嘴破损,推力大幅下降。SLIM的导航摄像头后来在月面上发现了脱落的喷嘴。
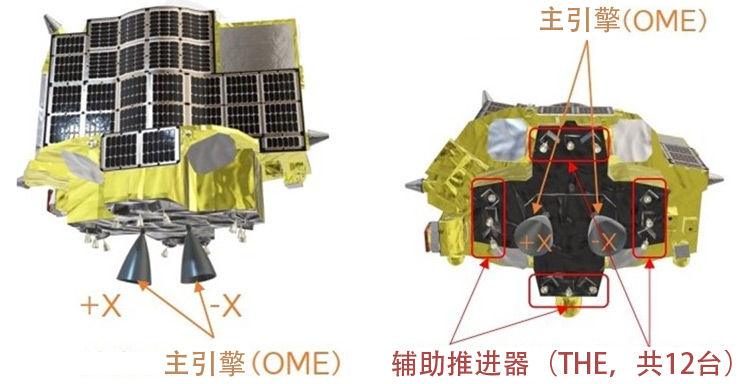
主引擎和辅助推进器的配置图。发生异常的是标注为“-X”的主引擎(示意图,由JAXA提供)
此外,多数探测器采用通过设备维持燃料供给压力的“调压方式”,而SLIM为减轻重量采用了燃料消耗后压力自然下降的“泄压方式”。异常发生于着陆前98%的喷射阶段,此时压力下降可能影响了正常点火。在此之前引擎性能完全达标,且开发阶段的燃烧试验也未出现故障。调查排除了制造缺陷的可能性。
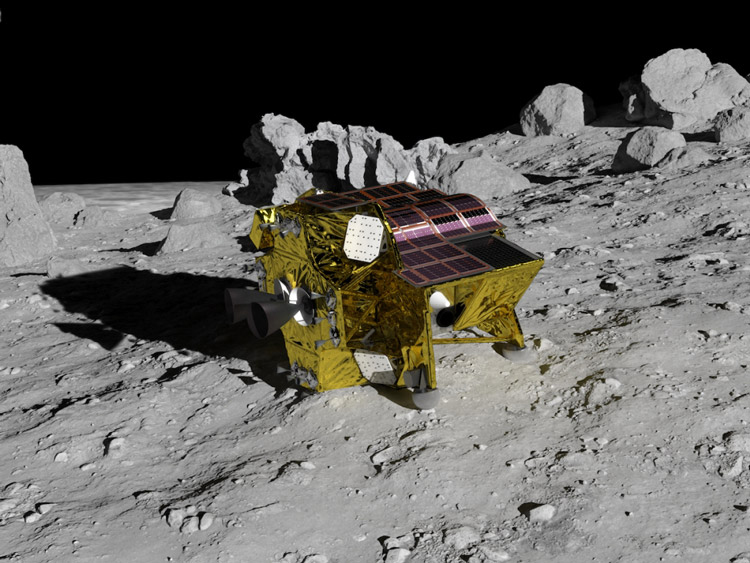
SLIM原计划的着陆姿态:太阳能电池板朝上,以便高效接收阳光(供图:JAXA,示意图)
在记者会上,坂井教授坦言:“我一直在反思是否可以预见此次故障。由于试验阶段一切正常,确实存在考虑不周之处。为了实现轻量化,我们采用了较为大胆的设计,虽然98%的阶段都运转正常,但最后出现了这样的意外。这次经验为未来应用泄压式设计提供了重要参考。”
由于引擎故障,SLIM未能完成原定的“两阶段着陆”的验证。该技术设想先用一根主支架接触月面,随后使用其余四根支架在斜坡上调整姿态完成着陆。坂井教授表示:“由于故障发生前的飞行均严格按照计划进行,若无意外情况,两阶段着陆本应成功实现。”
小型机器人拍摄的照片“任何人都能看出这是月面”
SLIM所搭载的电子设备并未针对月面夜间零下170度的极寒环境进行特别设计。但结果,它成功熬过了3次月夜,并实现了4次复活。在这一过程中获取了机体各部温度变化的数据,这在技术上是一大收获。坂井教授表示:“每次熬过夜晚后温度都稍有升高。如果对这一变化进行深入研究,或许能找到SLIM最终停止工作的线索,并为未来的月球及行星探测提供重要参考。我希望能继续研究下去。”
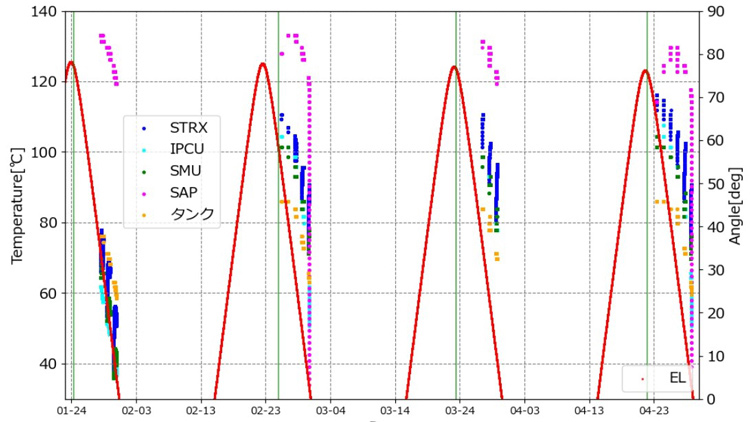
SLIM机体各部位(用不同颜色的点表示)温度随时间的变化趋势。每次“复活”后温度都会逐渐上升。(供图:JAXA)
在原本应产生电力的2024年6月下旬未能与SLIM实现通信,团队曾考虑可能是5月发生的“太阳耀斑”(太阳表面大规模爆炸现象)导致机载程序异常。尽管地面多次尝试发送正确程序以恢复通信,但均未奏效。虽然难以断定,但目前认为问题并非由太阳耀斑引起的。
SLIM搭载的小型机器人共有两台,分别为“LEV-1”和“LEV-2”。它们在距离月面约5米的高度从SLIM分离后,在月面展开活动。由中央大学等开发的LEV-1通过跳跃方式在月面上移动,并成功实现了与地球的通信;而由Takara Tomy等开发的LEV-2则通过变形移动,成功拍摄到了月面上SLIM的影像。原本LEV-1也计划拍摄,但因软件问题未能如愿。
LEV-2是史上最小、最轻量的月面探测机器人,昵称为“SORA-Q”。JAXA受日本国立研究开发法人科学技术振兴机构(JST)的“创新枢纽构建支援项目(通过开拓太阳系前沿以扩大人类生存圈及活动领域的开放式创新枢纽)”的委托,与Takara Tomy签订了关于小型机器人技术与控制技术的合作协议,开发出了这台机器人。正是这台机器人在月面上捕捉到了SLIM的影像,JAXA理事、宇宙科学研究所国中均所长表示:“看到那张照片的人都能明白SLIM在月面上。能获得这个成果真是太好了。”
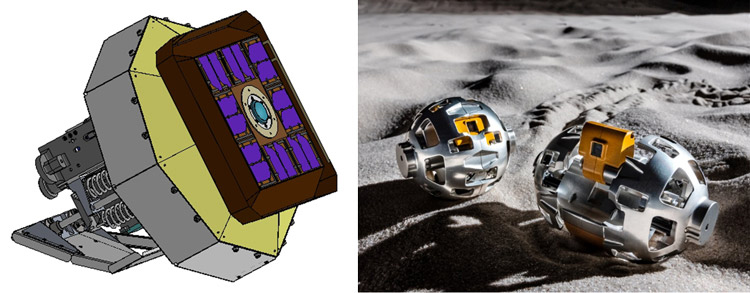
小型机器人。左侧的“LEV-1”通过跳跃移动(供图:JAXA、中央大学、东京农工大学,示意图)。右侧的“LEV-2”可变形为两轮行驶模式,图中为两台,但本次任务仅使用了一台(照片为验证机,供图:JAXA、TAKARA Tomy、索尼集团、同志社大学)
月面着陆:从“未竟之梦”到“夙愿以尝”
日本的探月历程充满曲折:2007~2009年绕月飞行探测器“月亮女神(SELENE (Kaguya))”最初曾计划搭载着陆器,但因优先观测设备而搁置;2000年前后提出的着陆器“辉夜姬-B(SELENE-B)”构想历经波折,最终演变为SLIM项目,实现了日本的登月夙愿。
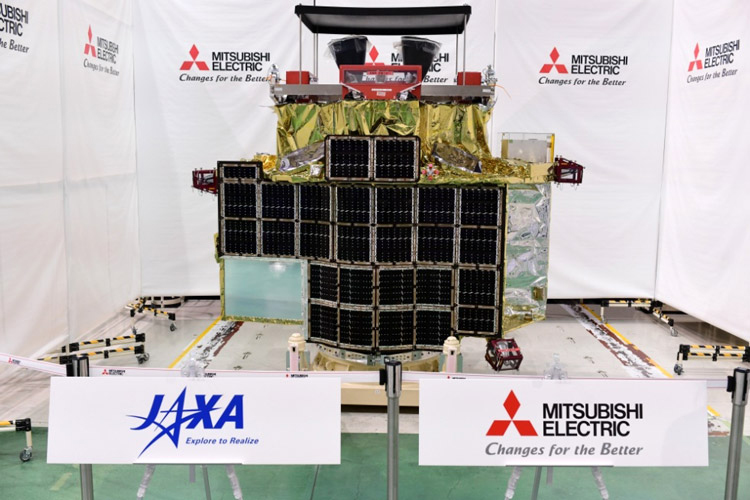
具有独特外形的SLIM。拍摄时主发动机朝上,与降落至月球表面时的状态相反(2023年1月于位于神奈川县镰仓市的三菱电机镰仓制作所拍摄,供图:JAXA)
另外,JAXA在2022年曾尝试包裹大小的超小型着陆器“好客号月球探测器(OMOTENASHI)”登月,但未能成功。但即便成功,该探测器也不属于常见的缓慢降落的软着陆,而是属于保留一定速度的“半硬着陆”。
SLIM的登月带来了多项科学成果,在工程领域已提交约20篇学术论文。理学方面,通过光谱相机分析了在陨石坑附近发现的裸露的“橄榄石”的组成,“橄榄石”源自月幔,是由冷却凝固的岩浆形成的火成岩,通过与地球上同类岩石进行比较,或将有助于深化对月球起源及历史的理解。相关论文正在投稿中,让我们期待精准着陆带来的发现。

ispace公司于1月15日发射的月球着陆器(2024年9月拍摄于茨城县筑波市)
此外,SLIM的表面还搭载了由美国航空航天局(NASA)提供的反射镜。虽然SLIM本身已结束其使命,但未来绕月探测器还能利用该反射镜进行测距等作业。
另一方面,日本的航天初创企业ispace于2025年1月15日在美国发射了其自主研发的第2台月面着陆器。2023年4月,该公司第1台月面着陆器由于在着陆前对高度产生了误判,猛烈撞击到月面,以失败告终。2025年5月末计划再次进行尝试。SLIM项目的坂井教授表示:“作为同样挑战月面着陆的团队,我们深知其中的艰难。作为民间企业有着不同的意义,我相信成功之后必将开启更为广阔的发展。希望他们这次能够成功,并继续挑战下去。”
成果是“面向未来的宝贵财富”

国中均所长在记者会上(2025年1月26日,东京都千代田区)
以严厉评价著称的国中所长被要求为SLIM的表现打分时笑着说:“着陆部分60分。LEV-1、LEV-2以及光谱相机取得了良好成果,各加1分,经历了3个夜晚,再加3分。此外,陶瓷推进器(主引擎)的停止基本可以解释出原因,还有着陆后机体温度等数据,都是将来值得参考的重要知识。这些都是面向未来的宝贵财富,所以我再加3分,总共打69分。”他微笑着补充道:“如果是你们,会打多少分呢?”
在发布会接近尾声时,被问及SLIM的意义,国中所长将其与太阳系探索的历程和展望相结合,作出了如下回答:“在(通过国际合作进行月球探测的)阿尔忒弥斯计划中,以月球为跳板前往火星是重要课题。(在小行星探测器)隼鸟号与隼鸟2号的任务中,我们成功抵达了微小天体,而这次,我们踏入了月球这个拥有地球六分之一重力的全新领域。只要不断打磨这些技术、知识和经验,我们不仅能在月球上自由探索,未来甚至可以逐步实现登陆火星本体(而非其卫星)并进行活动。SLIM就是这一进程的先驱。”
坂井教授则表示:“我们取得了很多成果,但如果一定要选出最重要的一项,那就是人才。”他指出:“从实物制造、管理,到发射、运行以及在月球着陆,整个过程让多名中坚力量和年轻人都积累了宝贵经验。我非常期待他们在未来的各种挑战中大展身手。”

或许正是凝望月亮淬炼出的感性,成就了SLIM的诞生
自古以来,日本人便以赏月来滋养想象力,淬炼出了细腻的感知力。“我并非此国之人,乃来自月之都城”——从被誉为日本最古老传说的《竹取物语》开始,月亮便不断出现在日本文学作品中。日本的传说中,月亮上有兔子在捣年糕。虽然不知真假,传说夏目漱石将“I love you”译作“月色真美”。如今,日本在令和时代实现了需要极致精密的定点着陆,或许正是这份凝望月亮积淀的细腻感性与技术在某处悄然连接的体现。未来回望历史,SLIM的成功将被视为以科技之力推动“月亮与日本人”关系深化的里程碑事件。
原文:草下健夫/JST Science Portal 编辑部
翻译:JST客观日本编辑部
【相关链接】
JAXA宇宙科学研究所「SLIM PROJECT」











