
日本京都工艺纤维大学等组成的研究团队通过实验发现,行人在人行横道等场所行走时之所以不会相互碰撞,是因为通过时间预判建立了整体的秩序。如果有部分行人分心,便会影响整体。该成果对进行集体决策、了解动物群体性以及避免机器人和无人机碰撞等都有帮助。
在人行横道或步行道等场所,行人可以在没有任何人引导的情况下自然行走而不会彼此碰撞。这与鱼群或鸟群相同,是整个群体自发形成有序结构的“自组织现象”。对向行人之间形成互不干扰的队列通行的“渠化现象”就是其中一个例子。
以前一直是用数学模型来解释这种机制,即人根据与某个时间点遇到对象之间的距离来避免碰撞。但近年来,随着人群运动图像分析技术的提高,出现了这种数学模型无法解释的现象。虽然个人会预判对方的位置,但对整个人群的影响一直没有获得实验验证。

行人对行实验(图片由京都工艺纤维大学提供)
对此,京都工艺纤维大学的研究团队先假设“预判会促进人群的自组织”,并对此进行了实验。实验时让各有27个人的两组人群相向而行,让其中一组的3个人一边用智能手机计算数学题一边行走,分散其对周边的注意力。
结果发现,与没有人计算数学题时相比,有人计算时不仅是本人,整个群组的行走速度都会降低,渠化速度也比较慢。这表明,即便只是部分打乱预判,也会影响整个群体的自组织。
另外,计算数学题的人还会闯入对面走来的人群等,并在发生碰撞前突然大幅改变方向。不仅是本人,无法预判其动作的对向行人以及同向行走的人也会突然大幅改变方向。无人边走边计算数学题时则没有发生这种现象。
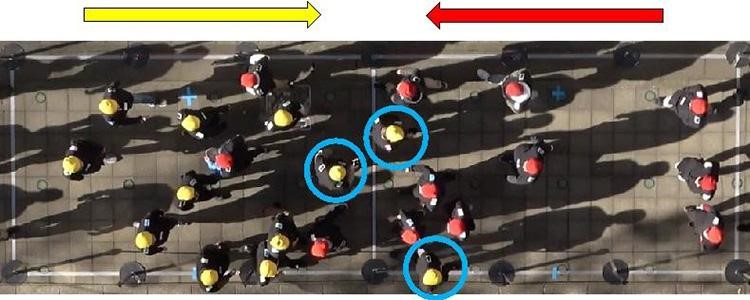
实验场景的俯视图。蓝圈标出的人在用手机计算数学题(图片由京都工艺纤维大学提供)
通过以上结果可以确认,如果有部分行人注意力不集中,那么不仅是本人,还会影响周围人的预判。预判需要双向进行,避免碰撞必须双方协作完成,相互之间的预判会影响整个群体的秩序。
研究团队通过该成果证明了人类等在群体中相互预判的重要性。这为人类的集体决策以及动物和机器人群体等各种自组织的研究带来了新的角度。还有望用来预防拥堵和踩踏事故,规划活动和疏散路线等。
京都工艺纤维大学信息工学与人类科学系认知科学专业的助教村上久介绍说:“今后还打算研究视线与动作等带来的影响。通过反复进行验证,可以构建根据预判处理群体行动的优化数学模型。或许还有助于避免机器人和无人机的碰撞等。”
此次的研究团队由日本的京都工艺纤维大学、长冈技术科学大学和东京大学的研究人员组成。相关成果已于3月18日发布在美国科学期刊《Science Advances》上。该研究得到了日本学术振兴会科学研究费助成事业、科学技术振兴机构(JST)未来社会创造事业和文部科学省卓越研究员事业的援助。
论文信息
论文:Mutual anticipation can contribute to self-organization in human crowds
杂志:Science Advances
DOI:10.1126/sciadv.abe7758
日文:JST Science Portal 编辑部
中文:JST客观日本编辑部











